


近年来激光技术飞速发展,涌 现出可与机器人柔性耦合的光纤传输的高功率工业激光 器。先进制造领域在智能化、自动化 和信息化技术方面的不断进步促进了机器人技术与激光技术的结合 [1],光纤 激光器与工业机器人结合组成三维柔性加工系统成为近些年来研究的热点, 相关设备已经在汽车制造、冶金、材 料加工等行业得到应用 [2]。目前的三维空间钣金件的切割大多采用工业机器人作为切割机的方式,采用六自由度工业机器人的空间运动方式来完成对空间图形材料的处理;其缺点就是采用手动示教编程方式,这种模式针对固定零件外形的切割适用,针对种类 多、数量少、个性定制外形的切割加工则需要频繁切换夹具和示教编程, 非常耗时、效率低下。另外,相比传统激光柔性加工系统的控制方法,激光器的控制采用西门子 S7-300PLC 作 为控制终端,机器人采取串口通讯方 式 [3],控制硬件造价昂贵。本文采用 KUKA 机器人作为主站的控制方式来 作为激光切割应用的系统集成,利用 RobotMaster 软件强大三维图形的处理能力,机器人采用离线编程的方式, 这样有效的解决了以上问题,提高了生产效率,且更安全,对于三维异形钣金件的切割更为方便智能。

1. 基于 KUKA 机器人作主站的激 光切割系统设计
◆ 1.1 基于 KUKA 机器人作主站的激光切割系统的硬件设计
基于 KUKA 机器人作主站的激光 切割系统的关键点是激光器的控制。 在 KUKA 原来 KR16-2 本体和原装的 KRC4 控制柜的裸机系统中,并没有配 置好与激光器所需要的控制信号,由 于 KRC4 机柜采用的是 Beckhoff 主机, 所以可以通过 Ethe CAT 总线扩展出来 对应模块来满足对激光器的开关控制、 激光焦距随动控制系统、自动调焦系 统和切割气压的控制要求。由于 IPG YLR-500-MMWC 光纤激光器需要提供 PWM 信号、模拟量信号、数字量信号, 所以可以通过 Beckhoff 的总线耦合器 EK1100,扩展 EL2502 模块(2 路 PWM 输出)、EL4004 模块(4 路模拟量输 出)、EL1809 模块(16 路数字量输入) 和 EL2809 模块(16 路数字量输出)。
◆ 1.2 基于 KUKA 机器人作主站的激光切割系统的软件设计
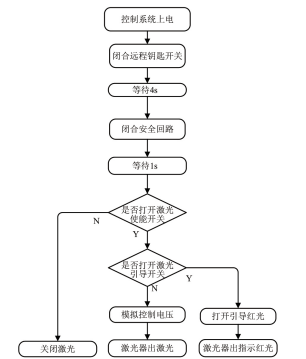
KUKA 机器人作为激光切割应用 的程序结构分为 3 大块,包括激光器控制子程序、自动调焦子程序、随动控制子程序。本文省略 自动调焦子程序和随动控制子程序的流程图。IPG 激光器的 控制子程序流程图如图 1 所示。
2. 基于 KUKA 机器人作主站的激光切割系统的控制原理
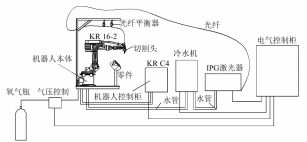
机器人系统不同于常用的工控机,不能对整个控制程序进行实时扫描,也没有一般数控系统具备的前瞻 (Look-Ahead)功能;当遭遇外部环境变化或者与外围设备发生干涉碰撞时,机器人系统并不能够自动识别而立即 停止工作,这是由于机器人系统只能对其程序语言进行逐行扫描所致 [4]。基于 KUKA 机器人作为主站的激光切割系 统控制原理图如图 2 所示,主要由以下 4 部分技术构成:
1) 采用六自由度工业机器人作为三维立体空间的运动机 构;
2) 激光切割头搭配升降机构,采用非接触式电容传感器 自动检测激光喷嘴与被加工件之间的工作间隙,实现焦点位 置自适应位置闭环控制,实时控制激光焦点在被加工零件的 位置,从而达到高质量、稳定的切割加工效果;
3) 采用平衡器防止机器人在切割的过程中拉伤拉断光 纤;
4) 采用离线编程的方式来处理被切割加工的零件模型, 提高生产加工效率。
3. 基于 KUKA 机器人的激光切割路径仿真与切 割加工
KUKA 机器人采用离线编程方式的工作方式,在 PC 机 上利用 RobotMaster 软件对三维零件图形 (STEP、IGS 文件 格式的零件 ) 的仿真处理,生成 KUKA 机器人能够识别和执行的加工代码文件,导入到 KUKA 的 KRC4 控制柜中 ; 设置好激光工艺参数和 TOOLbase 坐标后即可以按照仿真路径进行激光切割加工。图 3 和图 4 分别示例了三维异形件和 球面的切割模拟仿真加工。

4 结束语
采用 KUKA 机器人作为主站的三维激光切割系统,充 分利用了机器人的高柔性、低成本和智能化的特点;离线编程的应用,省时省力,解决了机器人控制系统无法准确在三 维曲面特别是球面上进行人工示教的轨迹切割难题。本切割方法在切割应用中使用得比较理想的是烧烤炉、LED 灯具 和安全帽类型三维工件的切割加工。
针对三维异形零件的切割加工应用,本文提供的是一种低成本的解决方法;而在需要变位机的应用场合,可以 在本文基于 KUKA 机器人作为主站的基础上,增加 1~2 个 外部轴,通过对 KUKA 机器人作进一步的系统集成控制来实现。
参考文献 :
[1] 冯丰 . 工业机器人用于激光切割的研究 [J]. 山东工业技术, 2016(16):39-40.
[2] 廖健宏,蒙红云,王红卫,等 . 光纤激光精密切割系统的研 制及其应用 [J]. 中国激光,2007,34(1):135-138.
[3] 居正月,吴建国,张永康 . 基于 ABB 机器人光纤激光加工系统的研究 [J]. 应用激光,2010,30(4):295-299.
[4] 胡亮,罗敬文,张永康,等 . 基于高柔性机器人的光线激光切割系统的研究 [J]. 应用激光,2010,30(1):20-22.
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

