






2024年2月1日,上海交通大学医疗机器人研究院杨广中院士团队联合华中科技大学陶光明教授团队在Cell Press细胞出版社期刊Matter上在线发表了题为“Flexible fiberbotic laser scalpels: material and fabrication challenges”的展望文章。
文章阐述了激光手术刀和连续体机器人技术的基本工作机理与潜在应用,讨论了其在精准外科医疗领域的研究进展,并提出了柔性纤维机器人激光手术刀作为潜在的新型微创外科手术加工技术,在提升智能化医疗机器人功能性和临床适应性方面的优势和巨大挑战,并对该领域的未来方向进行了展望。
微创手术具有安全、切口小和术后恢复快等独特优势,极大促进了精准外科医疗的发展。随着现代医学和生物工程学等学科的发展,手术刀已从单一的金属刀具发展到超声刀、射频电刀等,这极大地提升了手术效率。尽管如此,在复杂手术场景中,手术刀存在器件尺度大、刚性强和操控性不足等问题,严重降低了手术治疗效果。激光手术刀技术的出现是精准外科医疗领域的重要里程碑,大量临床研究证明其具有高消融精度和效率、出血少和副损伤小等显著优势,在微创手术组织加工中具有广阔的应用前景。然而,微创手术对于小尺度柔性激光能量传输介质的机械和光学性能的高要求,以及传输介质与医疗机器人的集成方式的局限性,给激光手术刀技术在微创手术中的深入应用带来了巨大挑战。
与基于机械加工的传统手术工具不同,激光手术刀通过独特的组织光学作用实现高效生物组织加工。文章详细阐述了针对软组织与硬组织切除的光热消融与光致机械消融机理,并讨论了水介导和超短脉冲激光技术在缓解组织凝结、碳化等热损伤方面的研究进展(图1)。进一步地,文章分析了以Nd、Ho、Tm、Er和CO2激光为主的红外医疗光源在牙科、泌尿外科等多种手术领域的特点、优势与应用价值,并强调新型手术激光光源技术的进步给激光传输介质在灵活性、稳定性和操控性等方面带来的巨大挑战。
激光传输介质作为激光手术刀系统中的关键器件,需要稳定地将激光能量递送至特定手术部位。文章系统阐述了导光臂、空心波导和红外光纤三类主要医用激光传输介质的研究现状,并强调小尺度、高灵活性的红外光纤器件在微创外科医疗中的应用潜力。文章全面分析了红外光纤器件的研究进展,从激光传输阈值、光学损耗和机械柔性角度比较了光纤在Er激光和CO2激光中的器件性能(图2),并指出高光学损耗和低机械强度是限制红外光纤器件在外科手术中深度应用的关键因素。近年来多材料纤维技术的快速发展,不同光、力、电、磁等物理性能的复合材料高度一体化集成,为开发高柔性低损耗中红外光纤并进一步提升手术器械功能性提供了可靠研究支撑。
手术器械的精准操控是实现高效微创手术的重要因素。材料科学与生物工程学科的快速发展,催生了驱动方式多样的连续体手术机器人研究,促进了精准外科医疗发展。文章全面分析了现有连续体机器人的驱动机理与特性(图3),指出基于磁驱动方式的连续体机器人在安全、精准和智能化外科手术介入中的巨大潜力。此外,文章进一步提出了柔性纤维机器人激光手术刀的概念,激光手术刀与医疗连续体机器人的结合推动了其更为广泛的临床应用,这些系统已成功应用于泌尿外科、妇科和耳鼻喉科手术。
为适应更为复杂的临床生理结构和手术环境,需要进一步提升手术器械功能性。文章重点介绍了医疗机器人在定位、成像和信息感知等方面的研究进展,探讨了基于电磁追踪(EM)和布拉格光纤光栅(FBG)传感器的定位系统、基于电荷耦合元件CCD/CMOS和光纤束的成像系统、力感知以及温度感知反馈器件等技术的发展、特点与应用潜力。此外,文章提出了一种基于连续体机器人架构的柔性纤维机器人激光手术刀,它集成有定位、成像和感知功能,由连续体机器人骨架和功能装置组成,其核心功能是激光消融、驱动和获取信息,通过激光传输介质、驱动模块和嵌入机器人骨架中的传感器来实现(图4)。
外科手术器械的创新发展是驱动精准外科医疗技术快速进步的重要因素。激光手术刀正不断朝着小尺度、高度灵活、高效率的方向发展,并通过与导航操控、定位、成像和信息感知等功能器件深度融合,以满足更为狭窄、复杂多样的手术环境需求,在临床领域取得了诸多突破性进展。文章的最后总结了未来柔性纤维机器人激光刀在精准外科医疗中的优势和巨大挑战,并对该领域的未来发展方向进行展望(图5):(1)激光传输介质的材料、结构与制造,通过高性能生物相容材料创新与高性能波导结构设计,结合先进纤维制造手段,实现稳定、高效医疗激光输出的柔性激光传输介质开发。(2)医疗机器人的驱动、建模与传感,面向狭窄的解剖结构空间,深入探究医疗机器人驱动机理与新型结构设计,实现精准、安全的外科诊断与操作。(3)多材料纤维器件的开发,为临床介入提供更为灵活和智能化的手术工具。(4)光纤尖端微纳结构的设计与制造,丰富纤维机器人的多模态操作策略。(5)光纤侧表面上的分布式传感,为机器人提供了精确获取局部环境信息的能力。
华中科技大学博士生邹郁祁、任志禾、向远卓、硕士生刘超为论文共同第一作者,上海交通大学杨广中院士与华中科技大学陶光明教授为论文共同通讯作者,合作单位还包括中国科学院西安光学精密机械研究所等。该工作得到了国家重点研发计划、国家自然科学基金、华中科技大学交叉研究支持计划等项目的支持。
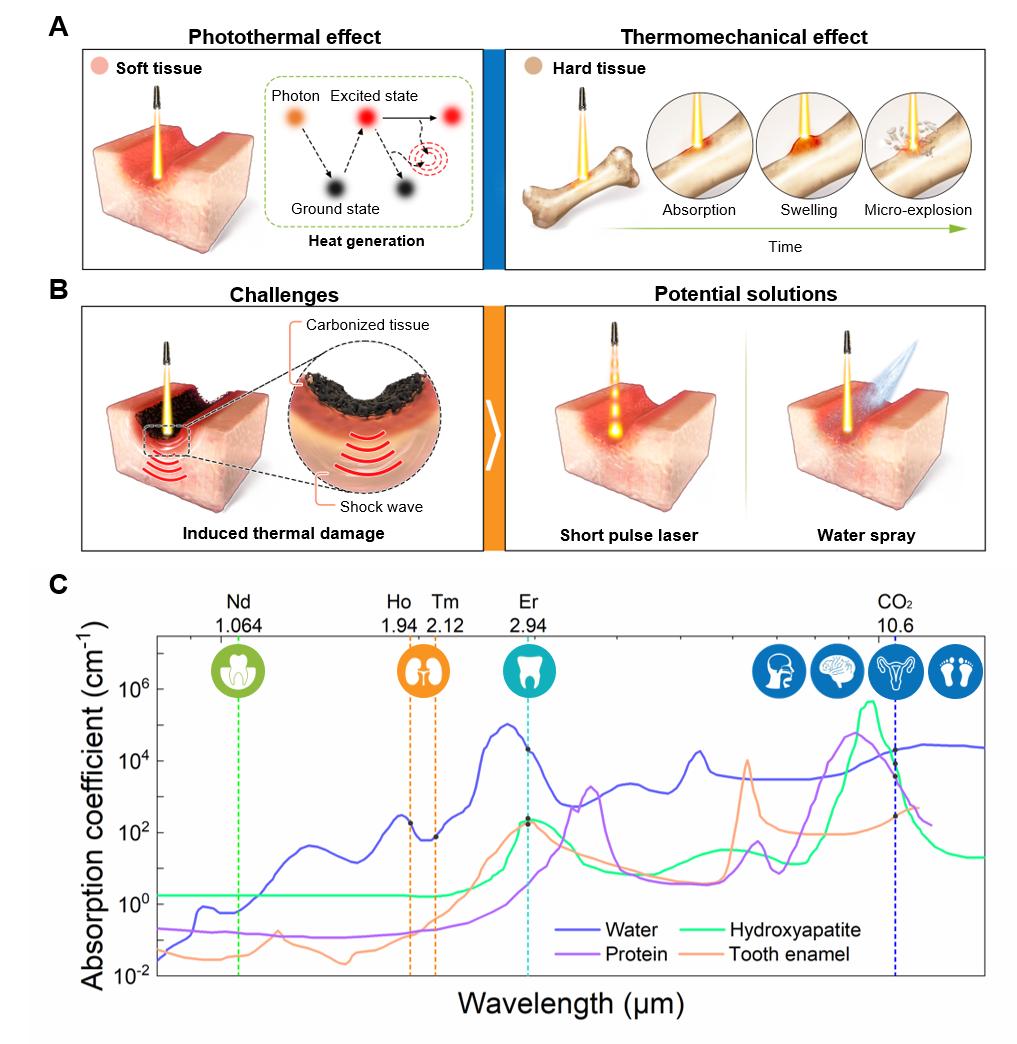
图1 激光消融机理与临床应用。
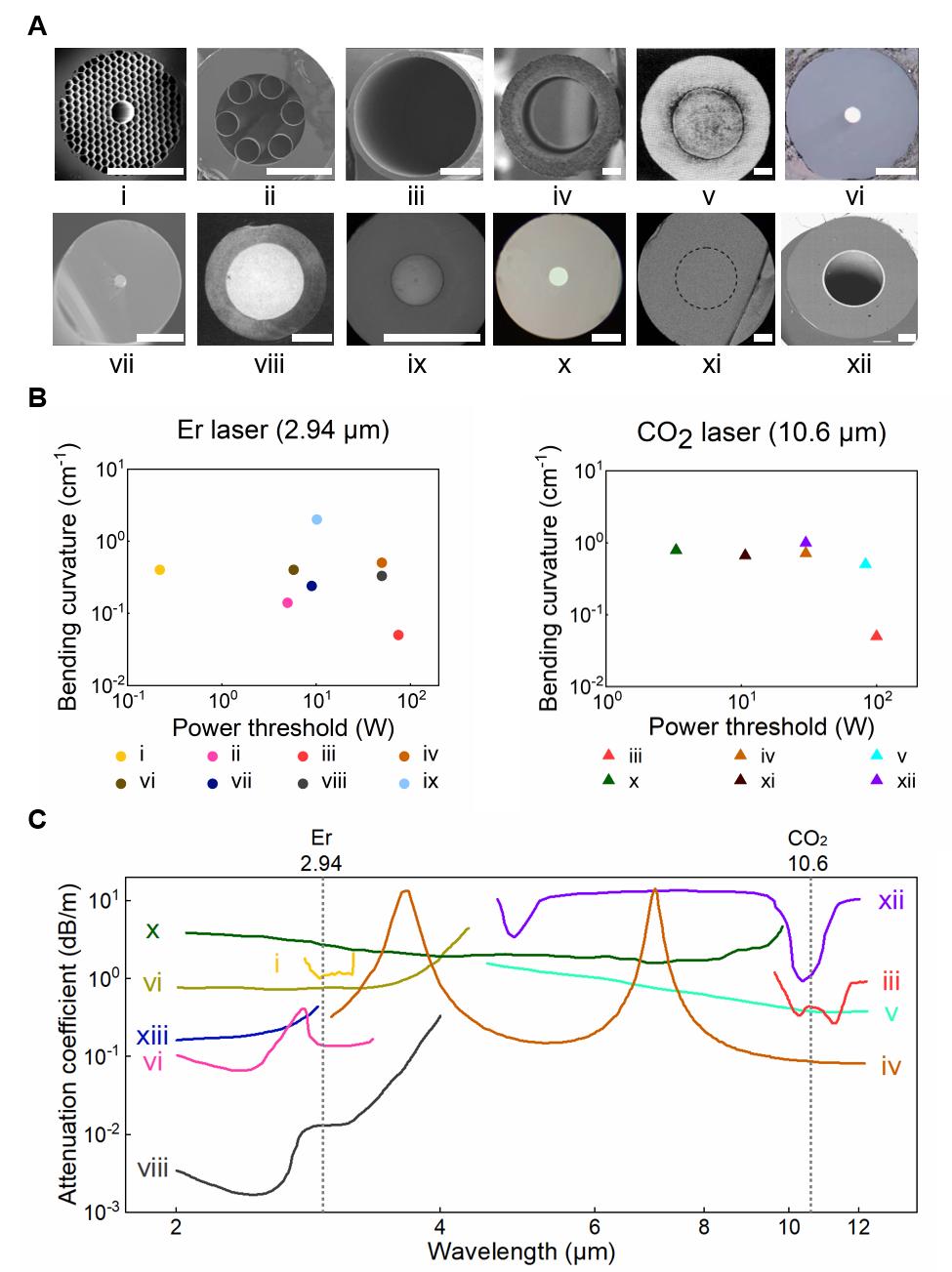
图2 典型中红外光纤器件及其性能对比。
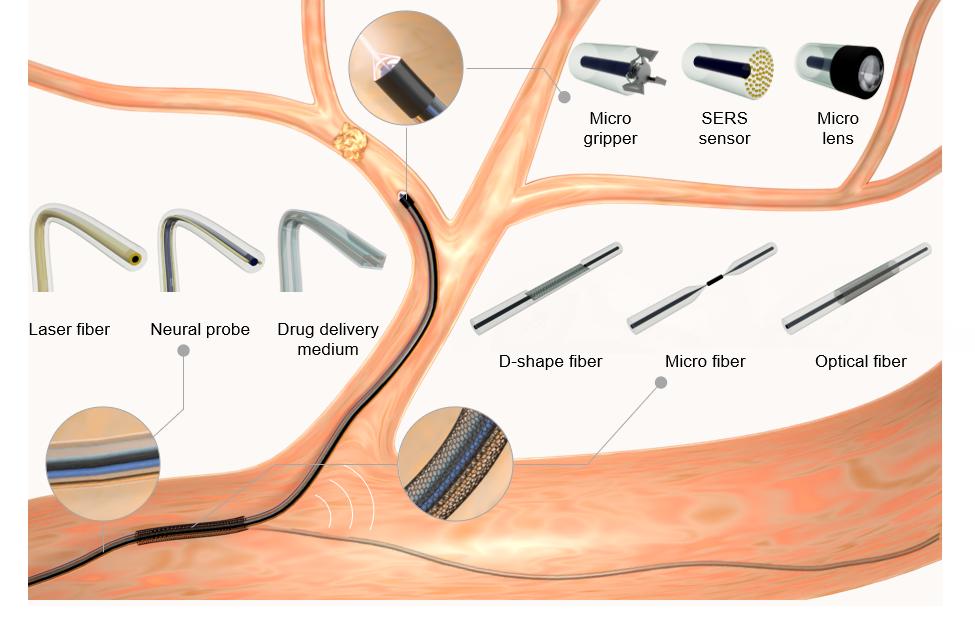
图3 医疗连续体机器人驱动方式。
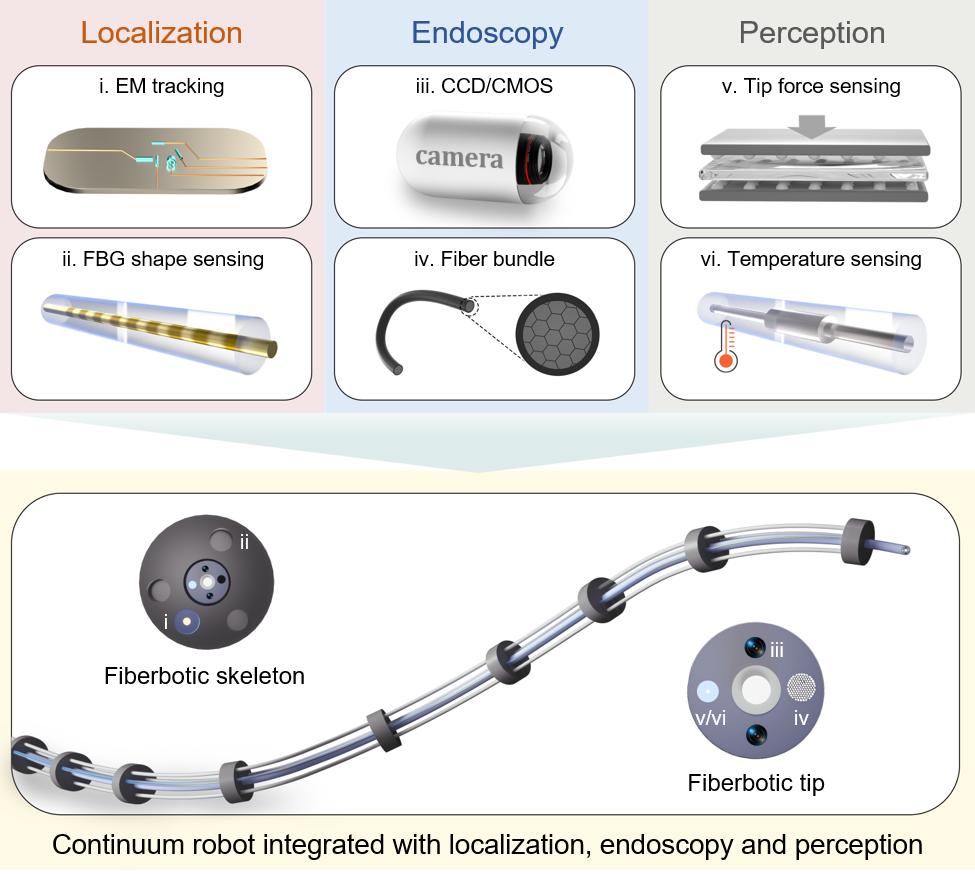
图4 可定位、成像与感知的多功能连续体机器人。
图5 未来的柔性纤维机器人激光手术刀。
作者专访
Cell Press细胞出版社公众号特别邀请陶光明教授代表研究团队接受了专访,为大家进一步详细解读。
CellPress:
近年来医疗机器人研究发展迅速,那么请问陶教授,您是如何踏上医疗机器人研究之路的呢?
陶光明教授:
我在从事科研初期,致力于红外光纤、功能纤维的基础研究工作,我们也不断尝试将我们的科研成果回馈社会、造福人民。后来在与本文共同作者、上海交通大学杨广中院士的交流中,我也逐渐意识到医疗机器人的巨大潜力。杨院士在医疗机器人领域取得的卓越成就、传递的科研思维观念,特别是他在Science Robotics创刊文中的经典论述[Sci. Robot. 2018,3, eaar7650],阐明了医疗机器人的未来发展方向,深刻地影响启发了许多像我一样的年轻科研工作者。
CellPress:
您能否介绍一下您团队目前在医疗机器人前沿领域的研究工作?这些工作的应用前景如何?
陶光明教授:
我们团队目前在医疗机器人领域的研究工作主要聚焦于开发用于微创外科手术的多功能医疗纤维机器人,我们认为这类高操纵性和强操作性的纤维态智能手术器件在精准医疗领域具有极大的应用潜力。通过纤维机器人数字化结构设计与多材料纤维制造技术,我们已经实现了200 mm/s流速下亚毫米血管内医疗纤维机器人逆流进动与多重级联栓塞操控,解决了远端亚毫米血管病灶的靶向精准抵达与多模态操作问题[Sci. Robot. 2024, 9, eadh2479]。此外,我们开发的柔性激光消融多材料纤维机器人,可实现了小弯曲半径下的稳定强激光输出,解决了微创硬组织手术中手术工具灵活操作受限的问题[iScience 2022, 25, 105167]。在未来的研究工作中,我们仍面临材料科学、光学、工程制造和临床医学等不同学科交叉带来的新问题,解决这些问题需要多学科科研人员的共同协作和努力。
CellPress:
文章指出,在所有连续体机器人驱动方式中,磁驱动技术更适用于柔性纤维机器人激光手术刀,实现精准微创医疗手术。您认为该技术的优势在哪里?
陶光明教授:
不管是基于绳索和同心管等外源驱动方式,还是基于气压、液压和形状记忆材料等内源驱动方式的医疗连续体机器人,在不同的外科领域均有其适用性,本文作者团队也进行了大量基于不同驱动机理的机器人研究工作[Sci. Adv. 2020, 6, eaba5660] [Sci. Adv. 2024, 10, eadj1984]。但我们均认为在微创手术中,往往涉及更为狭窄、弯曲的复杂手术环境,这对医疗机器人的器件尺度、安全性、灵活性和功能性提出了更高要求,相比之下,磁驱动技术已被大量研究证明是一种安全、精准、高频及远程的小尺度多功能医疗机器人驱动方式。
CellPress:
您在博士阶段从事了特种光纤的基础研究工作,从光学到多学科交叉领域,您在不同学科切换中遇到了哪些困难和挑战?
陶光明教授:
我在博士期间致力于从事红外特种光纤的关键技术研究,此后,进一步拓展到多材料光电功能纤维材料与器件的相关研究,在这个过程中,我逐渐认识到,当面对实际问题时,单一学科是有界限的,需要通过多学科交叉融合,不断吸收各学科的养分。在这个过程中,不同学科的研究人员打破单一学科的固定观念是极其困难的,我们需要保持耐心、包容和乐观的心态,为解决实际问题去攻关,尽自己学科的一份力。
作者介绍

杨广中
英国皇家工程院院士
杨广中,上海交通大学讲席教授、上海交通大学医疗机器人研究院创始人及首席科学家、英国皇家工程院院士。主要研究领域为医疗成像技术、传感技术与机器人。他创立了著名的英国帝国理工医学院的汉姆林中心,2017年被英女皇授勋CBE勋章,是首位获此殊荣的大陆科学家。

陶光明
教授
陶光明,华中科技大学三级教授、血管衰老教育部重点实验室副主任。致力于零能耗热管理新材料、智能纤维与织物空间和微创医疗纤维机器人等多材料光电功能纤维材料与器件的交叉学科研究工作。
相关论文信息
论文原文刊载于Cell Press细胞出版社旗下期刊Matter上,点击“阅读原文”或扫描下方二维码查看论文
▌论文标题:
Flexible fiberbotic laser scalpels: Material and fabrication challenges
▌论文网址:
https://www.cell.com/matter/abstract/S2590-2385(24)00007-9
▌DOI:
https://doi.org/10.1016/j.matt.2024.01.007
阅读原文
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

