




汽车氪获悉,斯坦福大学的研发团队开发出一款自动驾驶系统,可使自动驾驶车辆识别四周拐角处的物体,以便做出更早、更明智的操作。世界各地的研究人员正在努力开发机器学习技术,使汽车能够识别现实环境中的物体并进行自动驾驶。但是目前这些车辆只能识别眼前的物体。
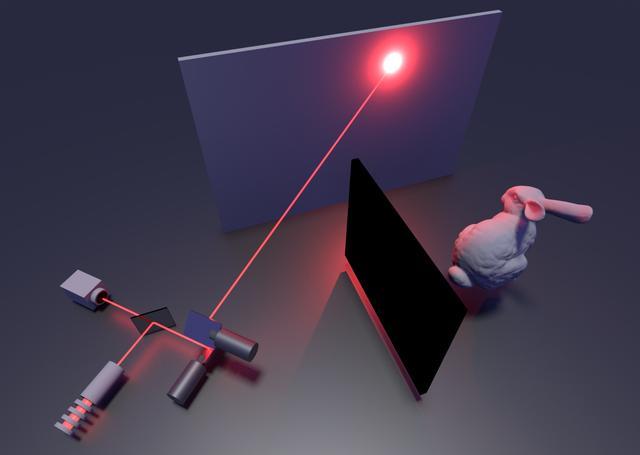
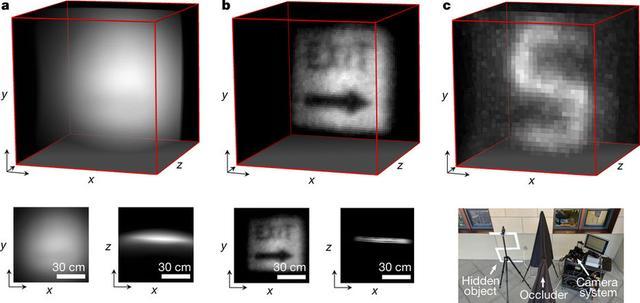
该技术基于超快速激光脉冲(super-fast laser pulses)而打造。目前所有的自动驾驶汽车视觉系统都使用兼容的激光雷达扫描仪来映射汽车周边的环境。在实验室测试中,该团队能够使用这些“皮秒”(picosecond)激光器扫描屏幕后面的物体,而无需直视。该技术是反射、光线传感器和强大的新物体识别算法的产物。此外,研发人员使用单光子雪崩二极管(SPAD)来放大撞击探测器的每个光子的信号。这些信号与墙的几何图形用于生成物体的3D视图。此前,用相同技术进行的尝试需要大量的计算能力和时间,但将传感器和激光器放置在同一地点会显著简化算法,在电脑上处理数据只需几秒钟。
该团队正在继续深化研究该系统,希望通过环境光(ambient light)来提高现实环境中的精确性。另外,速度也是一个问题。虽然算法速度很快,但仍需至少几分钟的激光返回数据才能生成图像。这对于高速行驶的汽车来说是不可行的。增加激光强度可能会是一种可行的方法。即使没有这些优化,也可利用这项技术来检测交通标志等反射物体。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

