






主要介绍了激光焊接探测过程中的6个典型的探测技术:光电二极管、视觉、光谱、声学、高温计和等离子电荷传感中的后四个技术的基本原理。同时介绍了多传感融合技术。
光谱仪
光谱分析仪经常用来分析焊接过程中的羽状物特征,如图1所示。焊接时焊接区的光辐射被准直镜收集,然后传输给光纤。羽状物的光谱通过光谱分析仪进行分析。在近几年,随着光谱仪尺寸的变小和成本的降低以及接口(I/O)的便利,光谱仪已经逐渐用于在线监测和自适应控制。基于获得的光谱谱线的相对强度,如图2所示,不同元素的谱线的相对强度通过Boltzmann-plot来进行计算。
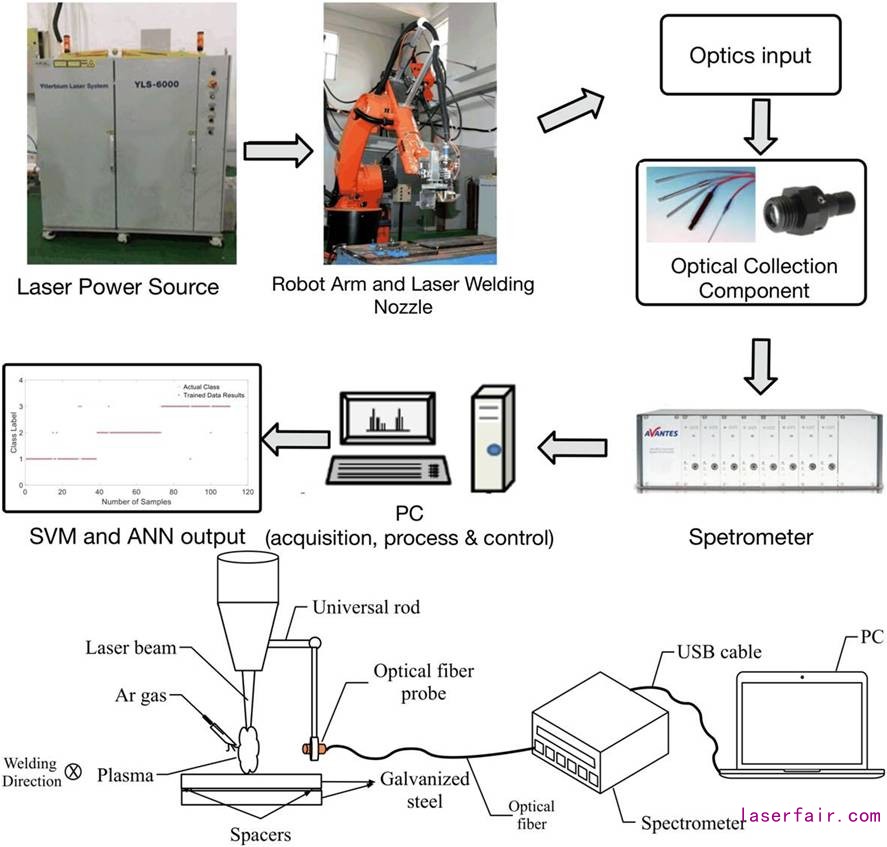 图1 基于光谱分析的示意图 文献1
图1 基于光谱分析的示意图 文献1
早期的研究表明,铝合金的焊接缺陷,如咬边和飞溅等,不仅整个光谱的辐射得到加强,就连铝的谱线也同时得到加强。如在激光焊接镀锌板时,Zn(或Fe)的电子温度同特征缺陷是明显相关联的,此时温度并不对焊接深度敏感。此外,羽状物谱线的强度可以用来帮助识别焊接速度的变化,如图3所示。
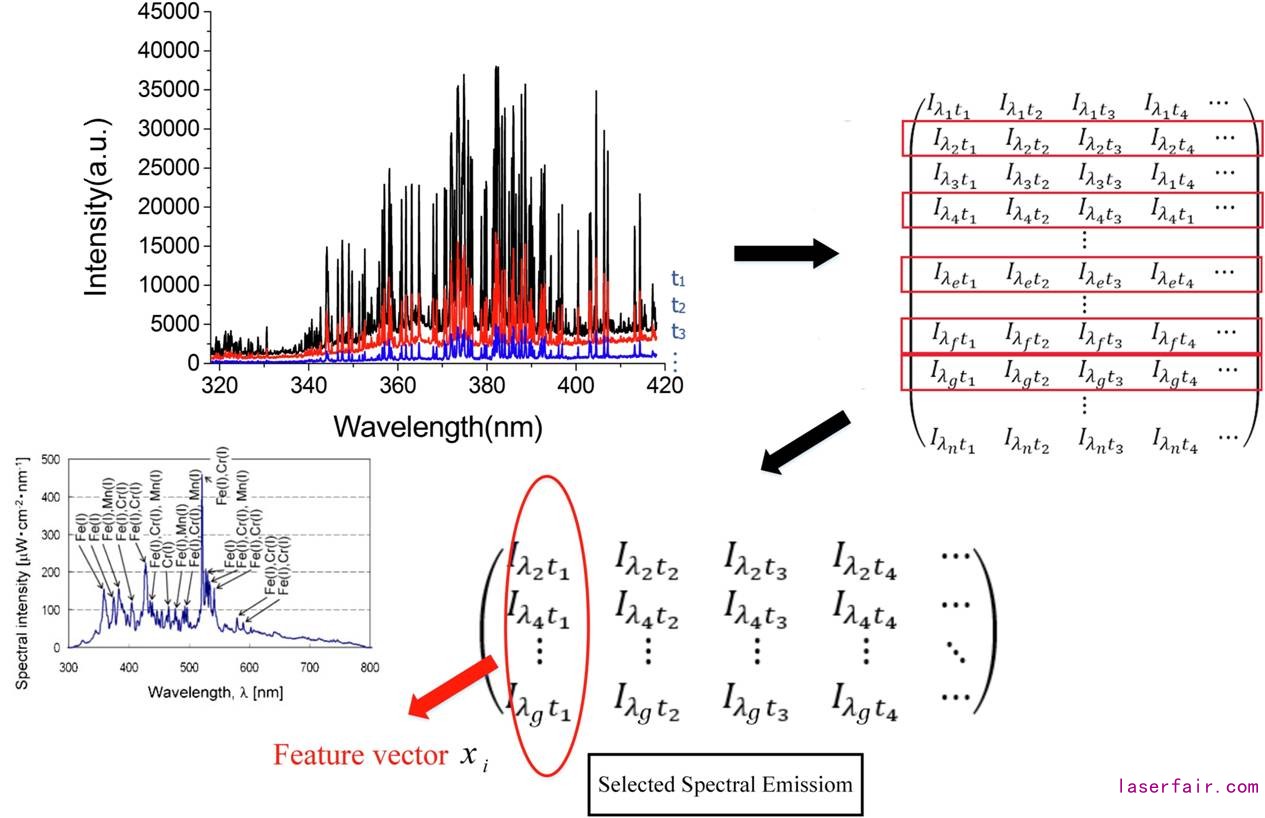 图2 基于光谱分析的激光焊接时激光诱导的羽状物的谱线图 文献1
图2 基于光谱分析的激光焊接时激光诱导的羽状物的谱线图 文献1
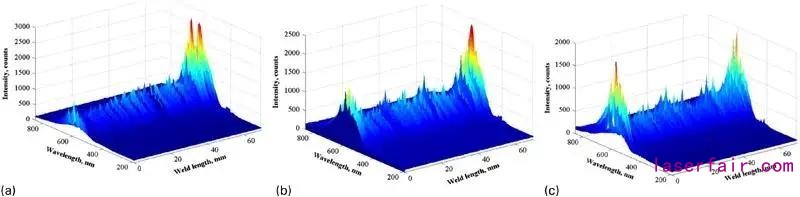 图3 激光焊接镀锌板时羽状物和等离子体的谱线:a 30;b40 ;c 50;(mm每秒)
图3 激光焊接镀锌板时羽状物和等离子体的谱线:a 30;b40 ;c 50;(mm每秒)
在Sibillano团队的研究方案中,采用海洋光学的低成本光谱分析仪进行缺陷探测和自适应控制的研究。基于对光谱的相关性分析,他们研究了不同保护气体速率的条件下的羽状物的动力学特征,如图4所示。图4a和b为气体流速为40NL每分钟的时候,其相关性为正。然而,如图4c和d所示,当气体流速为100NL每分钟的时候,其相关性为负值。
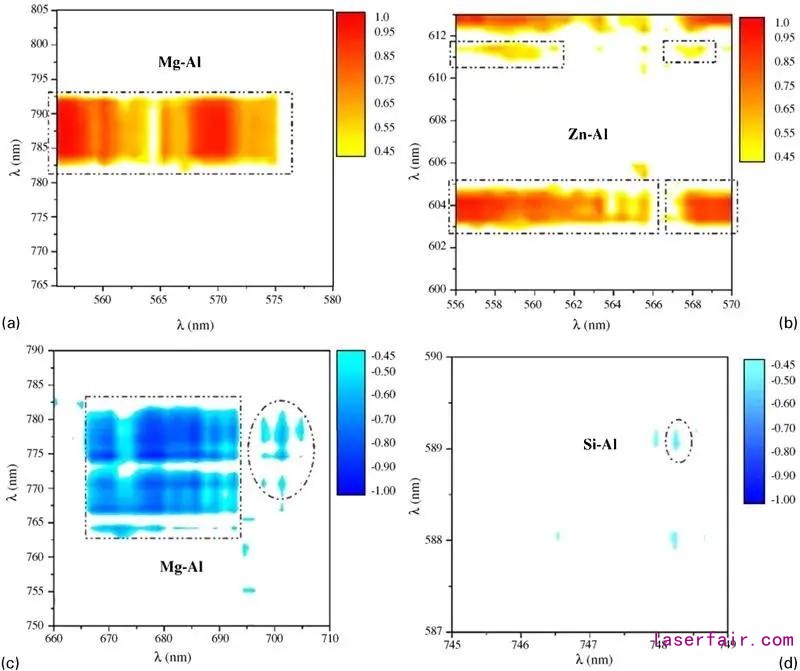 图4 光谱分析的相关性分析结果
图4 光谱分析的相关性分析结果
声学探测
在最近几年,基于声学进行激光焊接质量评估的研究并不多。这是因为用于安装接触声学探测的设备在大型生产的场合并不是很方便,如生产汽车的行业就是如此。而非接触声学探测仪则往往会受到环境噪音的干扰。因此,大多数的声学探测集中在如何提高识别精度和非接触探测时如何采用人工智能识别算法的鲁棒性上。
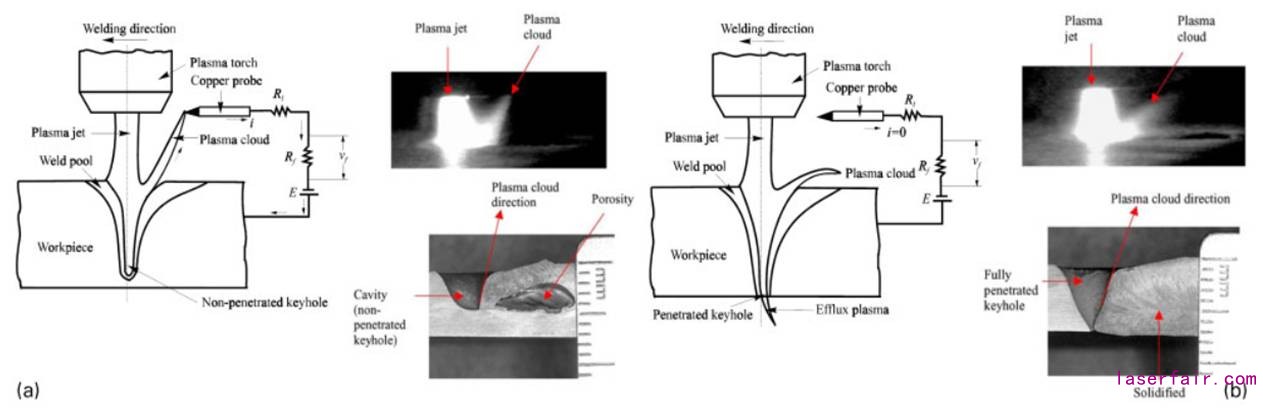 图5 等离子电荷传感探测匙孔焊接的深度
图5 等离子电荷传感探测匙孔焊接的深度
为了实现时间频率信号的有效性,Luo等人研究发现当焊接缺陷发生时,声发射信号在低频率(小于78Hz)的强度和频率震动幅度(781Hz和1562Hz)时会显著下降。此外,热传导焊接时的声信号和匙孔效应焊接时的声效应信号在10-20KHz时存在巨大的差别。对这一范围内的结果进行对比声学信号的特征,研究发现声学信号特征同金属蒸汽和匙孔形状密切相关。因此,焊接缺陷的精准识别可以通过神经网络来实现。
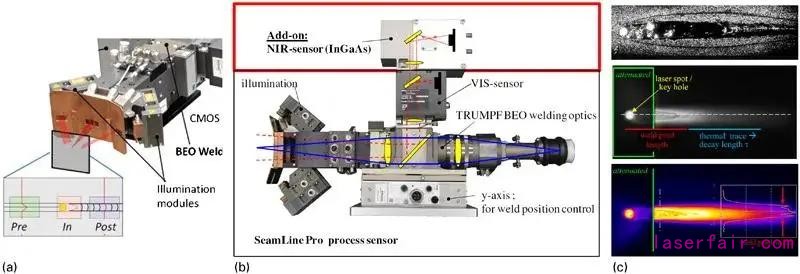 图6 多探头融合的激光头及其测量结果
图6 多探头融合的激光头及其测量结果
声学探测用于焊接缺陷的探测和监测是一个非常好的办法,但其声音往往会由于声音发生源和探测头之间存在一定的距离而产生延迟。由此可见,声探测仪用于自适应控制并不是最佳的选择。
声学探测用于焊接缺陷的探测和监测是一个非常好的办法,但其声音往往会由于声音发生源和探测头之间存在一定的距离而产生延迟。由此可见,声探测仪用于自适应控制并不是最佳的选择。
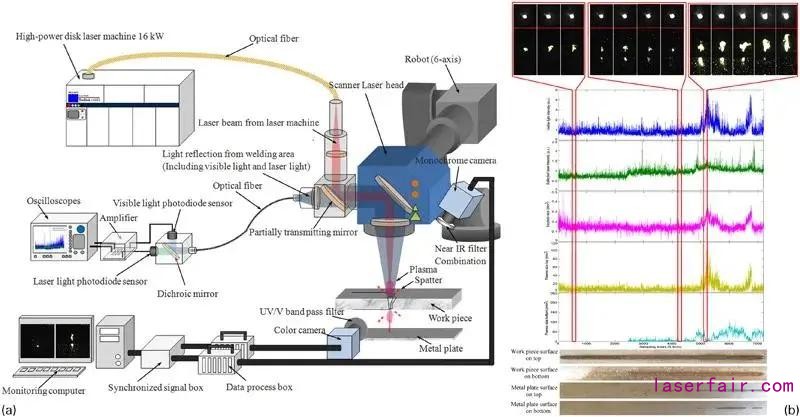 图7光电二极管和视觉系统融合的监测系统及其提取的6种信号
图7光电二极管和视觉系统融合的监测系统及其提取的6种信号
声学探测用于焊接缺陷的探测和监测是一个非常好的办法,但其声音往往会由于声音发生源和探测头之间存在一定的距离而产生延迟。由此可见,声探测仪用于自适应控制并不是最佳的选择。
高温计
热辐射强度可以反应温度的变化,从而可以借助高温计来进行探测。因此,由于温度的变化造成的焊接状态的变化可以作为分析的对象。此外,高温计的优点在于价格低廉和取样高效。一些研究人员开展了利用高温计进行激光焊接过程中热变化的探测。同时,Bertand和Smurov则在研究中利用高温计进行2D温度场的探测来进行工艺的优化。然而,Doubenskaia则指出,高温计的取样频率这一块应该给予更多的关注,不建议在探测范围(或者分辨率)上下功夫。
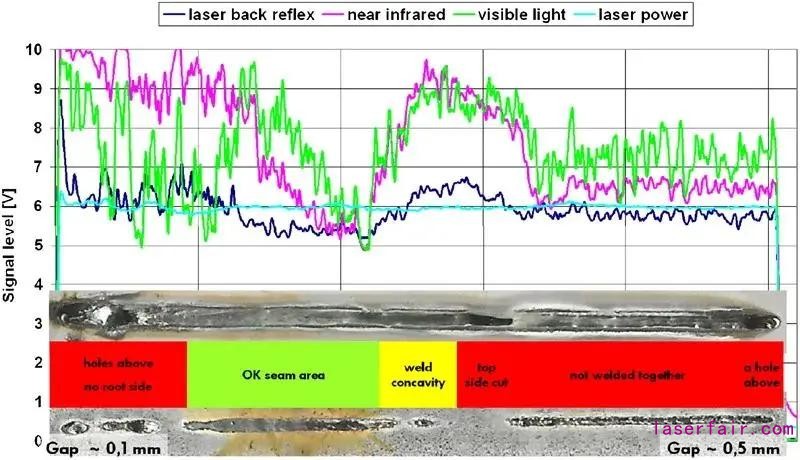 图8 FraunhoferILT和大众开发的汽车焊接在线监测进行检测的结果图
图8 FraunhoferILT和大众开发的汽车焊接在线监测进行检测的结果图
等离子体电荷探测
由于在焊接时产生的等离子体包含电离子和负离子,焊接喷嘴和焊接工件之间的电压可以由一个电容和电阻组成的回路来进行探测。早期研究结果表明等离子电荷传感对于测量等离子体温度非常有用。该技术一般用来识别焊接深度和焊接缺陷,如匙孔造成的失效、穿孔、光束位置偏离和焊道错位等。相应地,这些研究已经用于激光焊接的探测。W.Lu认为非常有必要确定等离子电荷和焊接深度之间的关系。大多数等离子电荷传感器均直接同激光头或喷嘴相连接。Zhang及其团队设计了一个测量回路并不是同喷嘴相连接的,该装置包含一个探测头,其位置是可变的。如图5所示。当探头在工件表面3-6mm且在电极后方轴线方向8-12mm时,此时的回路可以有效的区分完全穿透焊接和部分穿透焊接。相似的研究在弧焊、电子束焊接以及等离子体焊接过程中均存在。激光焊接的作用原理在本质上同以上过程是一样的,并且所有的焊接过程中存在均存在等离子体。
多探头融合技术
基于以上分析,可以推断出但一探头传感均存在退订的缺陷,原因就是大多数探头均有一定程度的低的长安探测精度和只能探测一定程度的焊接缺陷。因此,多探头长安刚好可以成为解决以上问题的一个好办法。
光电二极管传感和声学传感的融合
多探头融合的研究历史比较长了,这一方式主要有两种。一种是红外和紫外传感融合,一种是声学和紫外传感融合。红外和紫外传感使用的是光电二极管是用不同波段的波长来实现的。而声学和紫外探测的融合是采用光电二极管和麦克风来实现的。红外和紫外传感的融合被认为测量焊接深度时更为精确,且在探测飞溅和匙孔效应造成的缺陷(尽管过程不稳定)是比较有效的。实验表明声学探测和紫外发射均对羽状物的变化非常敏感。
多探头传感(NIR、可见光和辅助光)
视觉探测可以弥补光电二极管探测和声探测的不足,因为该技术可以获得空间的测量结果和获得更多的信息。因此就可以尝试将不同的视觉传感结合在一起来获得焊接过程中更丰富的信息。多探头传感在焊接缺陷的应用方面有一种是三个探头在不同的位置获取三个不同阶段的信息。这三个阶段是焊前、焊中和焊后。焊前主要用于焊缝的跟踪定位。焊中主要用于监控匙孔形状的稳定性。而焊后则主要获取焊后熔池的相关信息。目前,采用不同的探测器来研究同一位置的焊接区域是近年来的热点。图6所示为通快公司的近红外(INGaAs)相机和可见光(Si)相机安装在激光头上以实现同轴多视觉探测。依据获得的不同图像和不同形态特征,然后利用数据算法来进行提取,主要提取真实位置、速度、熔池尺寸或焊缝形貌等。多探头的优点就在于可以获得不同焊接状态下丰富的焊接信息。但其缺点就在于取样速度比较低,目前常用的取样速率为100-2000 f每秒(工业用,2014年的数据)。高速相机由于价格太过昂贵,目前还不适合用于工业生产中。由于速度慢导致视觉传感在探测缺陷时存在较大弊端。
光电二极管和视觉传感的融合
光电二极管和视觉传感的融合在近年来成为激光焊接的一个研究热点。其优点就在于取样速度块,获得的信息量大,从而可以获取焊接状态的丰富信息。D.You等人设计了一个四信号探头系统,该系统融合了两个视觉探头和两个光电二极管,如图7(a)所示。在辅助光照射(40W半导体激光器,波长为976nm),一个视觉探头用于探测匙孔和熔池的形状。另外一个视觉探测器用于获取窄光纤过滤镜片(350-750nm)顶部和底部的金属蒸汽的形成信息。两个光电二极管用于探测可见光辐射和发射的强度。该装置使用后提取的五种信号特征见图7b。图8为Fraunhofer激光技术研究所和大众汽车联合开发的用于汽车焊接的质量监控系统的工作效果图。
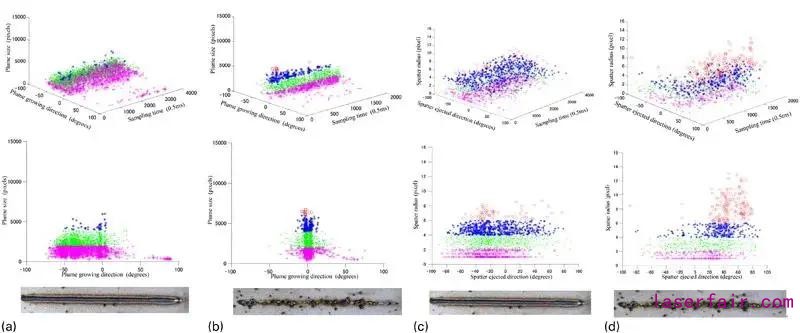 图9 经过图像处理后提取的信息特征
图9 经过图像处理后提取的信息特征
光电二极管和等离子体电荷传感的融合
在最近十年,激光电弧复合焊在工业中的应用引起重视并得到了应用。尤其是高功率激光(10-20KW)电弧复合焊用于造船和造桥中颇为关注。这类重工业对焊接质量尤为关注。此类应用的工件一般长度都超过1米,厚度一般都超过20mm。相应地,稳定可靠的在线监测系统就显得非常重要。Travis提出一个四信号探测系统,一个为UV、一个为IR。另外两个测量电流,一个电流为线和工件之间的;另外一个为喷嘴和工件之间的。结果发现,该系统可以判断焊接的稳定性。
人工智能的应用
多探头技术可以提供大量的焊接状态的原始信息(信号和图像).这些参数的特征均通过先进的信号和图像处理系统依据一定的算法进行处理。这已经是当前实现自适应控制的重点。
图像和数据处理
图像和数据处理的算法为准确控制和识别焊接状态的信息提供了有用的信息。如图9为视觉图像和影像处理技术相结合,经过图像处理后提取的信息特征图。图10为不同聚焦量的
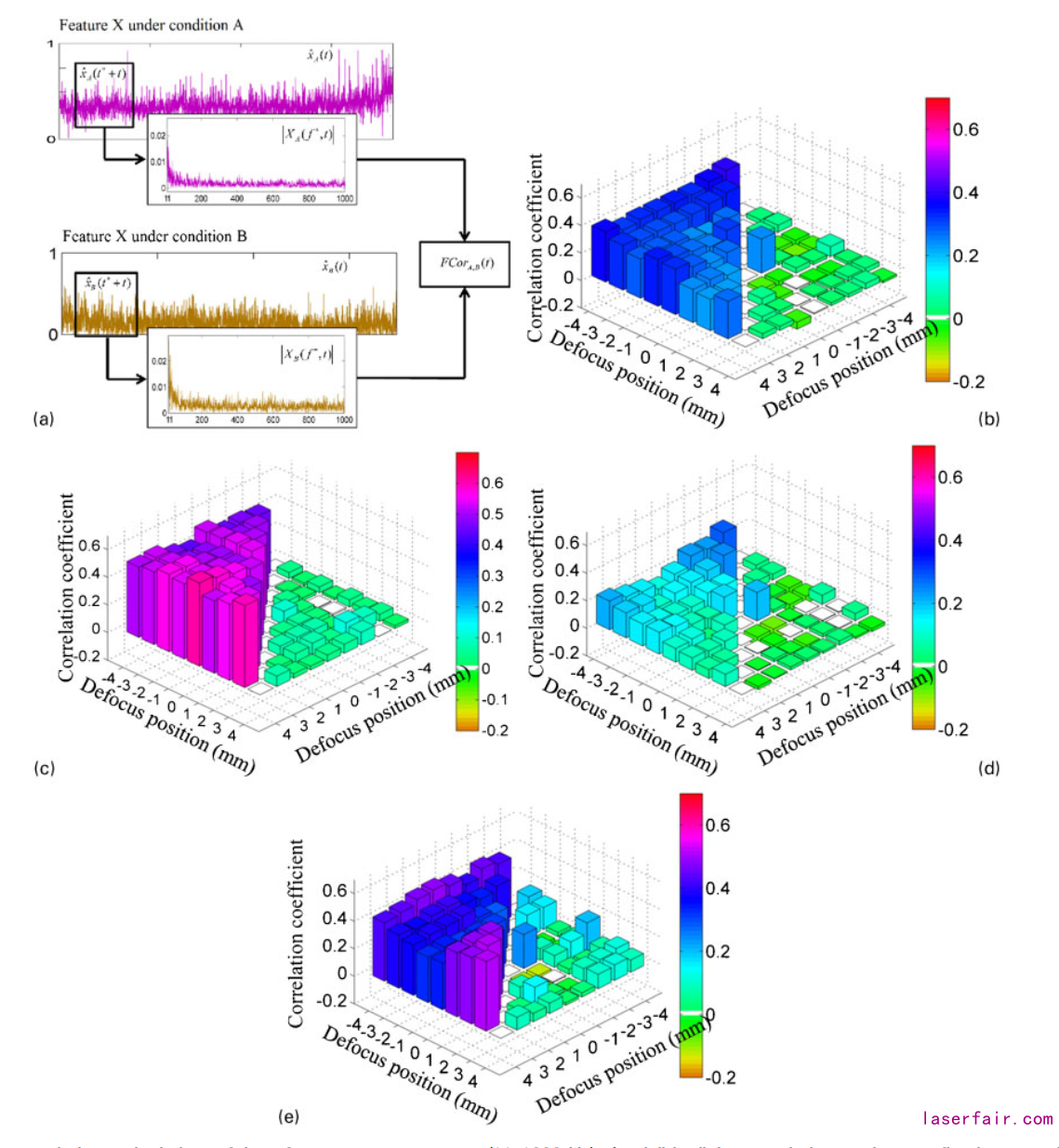 图10 不同聚焦位置变化时得到的相关系数
图10 不同聚焦位置变化时得到的相关系数
模式识别和分类
一旦特征量确定了,不同焊接状态或缺陷的识别和分类就需要用先进的模型来实现。图11为支持向量示意图。
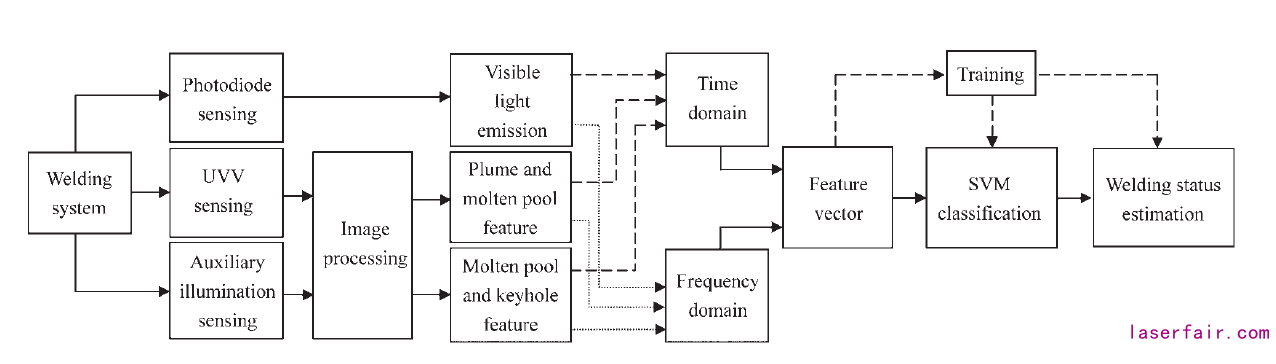 图11 焊缝状态的识别识别示意图
图11 焊缝状态的识别识别示意图
智能自适应控制
自适应控制可以帮助防止出现缺陷,目前焊缝跟踪的自适应控制主要基于结构光来实现的。基于多探头实现自适应控制的研究也是近年来的研究热点。图11为Nd:YAG激光焊接时的电子温度、功率和穿透深度变化的一个案例。图 12为连续激光焊接时的一个反馈控制。
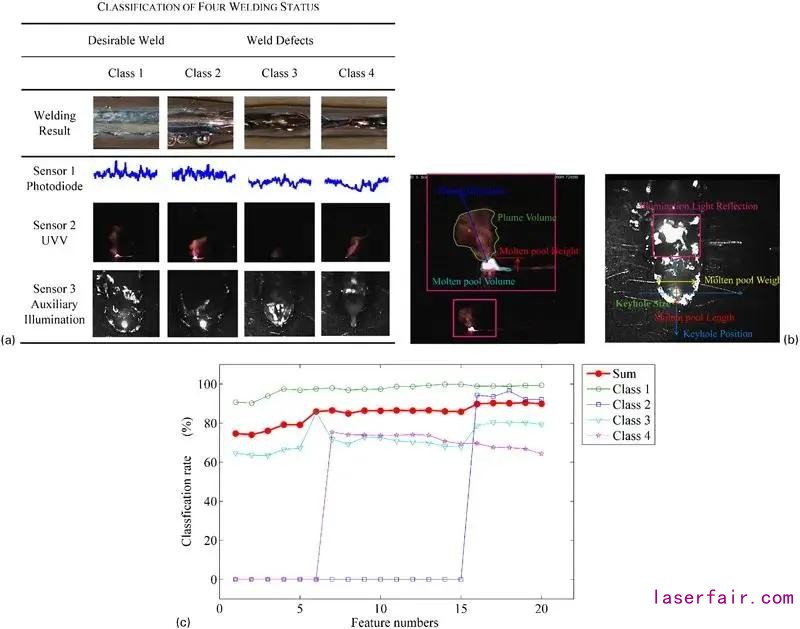 图12 基于三传感系统的焊接状态的支持向量设备的分类
图12 基于三传感系统的焊接状态的支持向量设备的分类
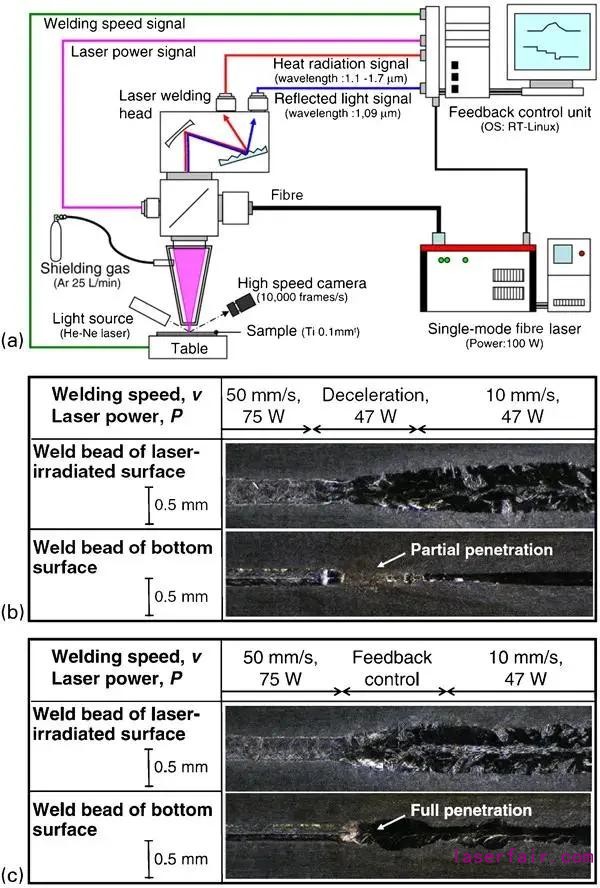 图13 连续单模激光焊接时的反馈控制。
图13 连续单模激光焊接时的反馈控制。
未来的研究方向
对于激光焊接的在线监测和在线控制,还有如下诸多的工作值得研究:
焊接过程中内部缺陷的探测
目前的研究工作基本聚焦在熔池、匙孔或金属蒸汽以及可以探测的焊缝表面的缺陷,如裂纹、飞溅等。但焊缝内部的缺陷如气孔、热裂纹、内部未完全熔合等,这些研究还距离实际应用还有很大的差距。目前内部缺陷的探测还是以离线检测为主。这种监测方法比较费钱和费时。因此,如果能够实现在线监测内部缺陷就可以显著的降低制造的成本。正因为如此,焊接内部的缺陷的探测就成为焊接在线监测的一个重点。
光谱分析和其他探测技术的融合
光谱分析提供了焊接在线监测中很多的有益信息。研究也表明,光谱仪分析得到的信息是其他探测仪器所不能获得的。最有价值一点就是其元素的信息。焊缝质量同元素成分和含量密切相关。可以预见,对金属蒸汽中的元素含量的深度分析可以帮助进行对不同焊接缺陷的产生进行分析。于是,光谱分析和其他分析探测技术(光电二极管、视觉)的融合将为焊接过程中的在线监测提供非常丰富的信息。
复杂的探测将被简单高效的探测技术所替代
有些探测技术只适合实验室监测,如X射线就是如此。不仅复杂,而且价格昂贵还是有辐射。因此,今后的发展确实必然使简单高效的在线监测技术将替代复杂的监测技术。
可变且可控的自适应在线监测技术
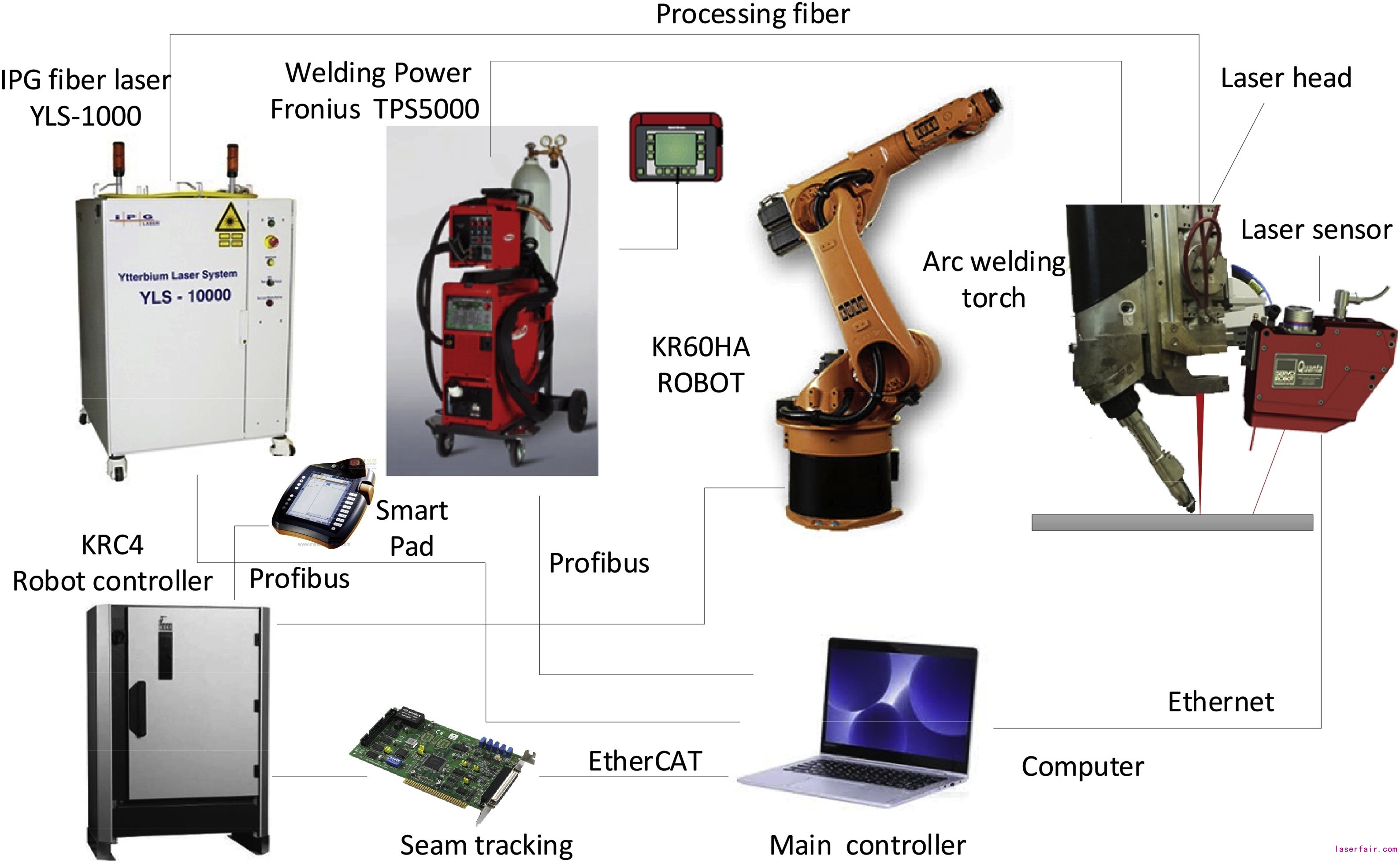 图14 自适应激光控制系统 文献2
图14 自适应激光控制系统 文献2
参考文献:
1.https://doi.org/10.1016/j.ndteint.2019.102176,A spectroscopic method based on support vector machine and artificial neural network for fiber laser welding defects detection and classification,NDT & E International,Volume 108, December 2019, 102176。
2.https://doi.org/10.1016/j.jmapro.2018.10.042,Adaptive control for laser welding with filler wire of marine high strength steel with tight butt joints for large structures,Journal of Manufacturing Processes,Volume 36, December 2018, Pages 434-441。
来源:Review of laser welding monitoringD. Y. You,X. D. Gao &S. Katayama,Pages 181-201 | Received 10 Sep 2013, Accepted 16 Oct 2013, Published online: 19 Dec 2013,https://doi.org/10.1179/1362171813Y.0000000180
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

