




四、试验结果
1、温度漂移试验
经过对倾角传感器自动调零原理的研究,设计并实现了自动调零伺服倾角传感器样机。为了验证自动调零伺服倾角传感器的自动调零和消除漂移特性,对此倾角传感器进行高低温试验。其温度试验结果如表1所示,其中V0和V180是内部倾角传感器在自动调零校正操作时在两个测量位置直接读取的,而Vout是调零校正后的计算结果(下同)。
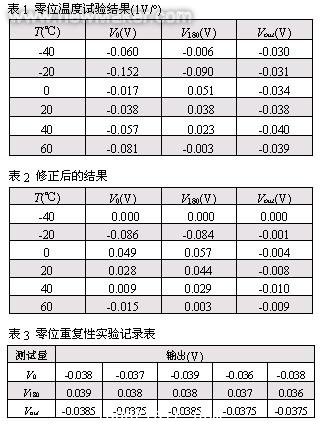
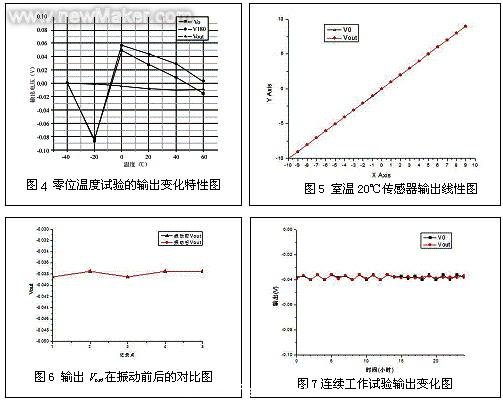
然后对结果进行修正,用于对数据进行分析,修正后的结果如表2所示。可以得到温度变化-输出变化特性图,如图4所示。可以看出,在低温-40℃到高温60℃的温度范围内,内部倾角传感器的输出V0具有最大为0.135V的温度灵敏性。而当经过偏移校正后,倾角传感器的输出Vout具有最大为0.01V的温度灵敏性。也就是说此倾角传感器的零位温度系数小于0.0001°/℃,其调零精度达到0.01°,达到了自动调零的目的,能够满足测试设备的要求。
2.零位重复性试验
零位重复性是指倾角传感器偏离零位后再恢复至零位时倾角的变化值。其数据记录结果如表3所示。对数据记录分析可知,自动调零伺服倾角传感器的零位重复性为0.001°。
3.误差分析试验
常温20℃,在-10°~10°范围内对倾角传感器进行测试,分别记录V0、V180和Vout。根据测的数据可以得到此倾角传感器的在20℃时的线性图如图5。

根据以上测得的数据可以计算出此倾角传感器输出Vout在全量程范围内的非线性误差为0.02°,能够满足测试设备的要求。
4.振动试验
将倾角传感器放在振动台上进行振动试验,振动试验的技术条件如表4所示。记录振动试验前后倾角传感器的零位输出V0、V180和Vout。其试验数据如表5所示。
经过对以上数据的分析,画出Vout在振动前后的对比图如图6所示。从图中可以看出自动调零伺服倾角传感器具有良好的抗振动和抗冲击性能,能够满足测试设备的要求。
5.连续工作试验
连续工作试验是指将自动调零伺服倾角传感器通电使之连续工作24小时,并在每隔1小时时记录其数据输出V0、V180和Vout的值。根据连续工作试验记录可以画出其连续工作的输出变化图,如图7所示。
五.试验结果
经过对自动调零伺服倾角传感器样机进行试验,最终测得其技术参数如下:
六.结束语
零位偏差和漂移是所有传感器都待解决的技术难题,本文通过研究自动调零的模型和方法及补偿量的算法,建立一套倾角传感器自动调零的理论和方法,设计实现了自动调零伺服倾角传感器样机,经过试验证明其具有良好的自动调零特性并能够消除漂移问题,具有非常重要的应用价值
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

