


近日,美国布朗大学的研究团队开发出一种3D扫描算法,该算法能够使您的智能手机甚至 包括数码相机获得高品质的3D扫描能力。
这一具有潜在突破性的创新来自该校工程学院Gabriel Taubin教授的实验室。Taubin教授称,他一直专注于尽可能地降低3D图像的捕获成本。“我的实验室一直专注的一件事就是如何用成本相对较低的零部件来捕获3D图像。”Taubin说。“现在市场上的3D扫描仪要么非常昂贵,要么无法做到高分辨率的图像捕获,从而不能用于那些对细节水平要求很高的应用。”
现有3D扫描技术的问题是,它往往依赖于一种被称为结构光的昂贵图像捕获机制——该技术将连续的光图案投射到目标对象上,被相机捕获。然后根据这些图案在扫描对象表面产生的变形,形成对象的3D模型。要做到这一切,硬件(特别是图案投影仪和相机)需要完全同步,因此成本自然就上去了。
到目前为止,很多新的3D扫描仪都在寻找各种办法使这个过程更加经济。但是Taubin和他的学生团队却另辟蹊径,开发出了一种算法,完全绕开了同步阶段——这意味着一部现成的相机就能够满足您捕获光线闪烁的要求。理论上,任何相机都具有在连拍模式(burst mode,即每秒连续拍摄数帧)中以捕获未压缩图像的能力。实际上,大多数数码相机,甚至一些高端的智能手机都具备这样的能力。
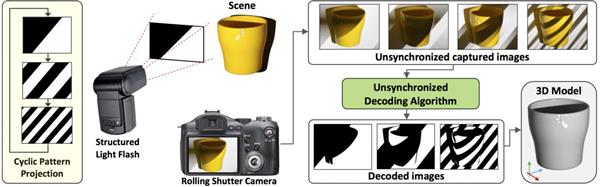
该研究团队上个月在SIGGRAPH亚洲计算机图形学大会上发表的论文中描述了这个算法。据研究人员解释称,同步是最合理的方法,因为它确保了不同的图案不会混合。在此之前普通的数码相机也从来没有这样使用过,因为大多数使用滚动快门的机构并不重视瞬间的完整视野,而是捕获局部一个个地像素——这可能意味着,在捕获投影光的时候,左边与右边并不是完全同时。
正如该项目的成员之一,Daniel Moreno解释的那样,这是个他们一直在致力于解决的主要问题。“我们不能使用一个具有混合图案的图像。而使用这种算法,我们就可以同步图像,就像我们拥有一个能够同步捕获图像和图案的系统那样。”他说。使用这种算法,他们可以借助投影图案里的二进制信息来校准图像序列的时间特性,然后将其用于组合成一个新的图像,即相当于完整地捕获了每个图像。随后的过程就与其它3D扫描技术基本类似了。根据他们的测试,使用这种算法捕获的图像精度与现有的3D扫描仪是一样的,这就意味着硬件成本可能在不久的将来显著下降。
事实上,他们相信智能手机也具有同样的可能性。“我们认为这可能是在使精准的3D扫描更便宜、更容易获得的方向上迈出的显著一步。”Taubin教授说。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯

 精彩导读
精彩导读




 关注我们
关注我们

