






作者:Aerotech INC.


In another recent Aerotech white paper, Customized Relationships and Coordinated Motion with AXISSTATUSFAST,
译者:叶惟仁 (Aerotech Taiwan)
Part-Speed Position Synchronized Output (Part-Speed PSO) 是一种全新的雷射触发控制技术,相对于已经于雷射产业应用多年的位置同步输出技术,Part-Speed PSO 可以基于向量速度进行超低延迟时间, 高实时性, 高速度的位置同步输出.
延伸PSO 的控制技术
Aerotech的PSO运动控制技术已经在工业界与研究领域被大量应用到各种科技上,例如雷射切割,雷射钻孔,雷射微细加工,或者传感器数据撷取,甚至视觉影像撷取等.PSO主要被用于高重复频率的应用,并且需要有极低 (ns) 等级的延迟时间.事实上,PSO能够将制程与运动控制进行无缝整合,是Aerotech运动控制器在市场上极受欢迎的原因.
Aerotech的PSO运动控制技术已经在工业界与研究领域被大量应用到各种科技上,例如雷射切割,雷射钻孔,雷射微细加工,或者传感器数据撷取,甚至视觉影像撷取等.PSO主要被用于高重复频率的应用,并且需要有极低 (ns) 等级的延迟时间.事实上,PSO能够将制程与运动控制进行无缝整合,是Aerotech运动控制器在市场上极受欢迎的原因.
PSO通常需要直接取得最多至三轴的位置回馈信息 (编码器,或光学尺等),以计算移动的向量距离.事实上,直接取得位置回馈确实有技术上的优点,但是有些应用难以做到这一点.由于计算PSO触发间距的方法使用的是向量和,传统的直角坐标系统X/Y/Z可以顺利使用PSO.但是传统而言,五轴系统或者并联式多轴系统,难以做到PSO的向量触发.
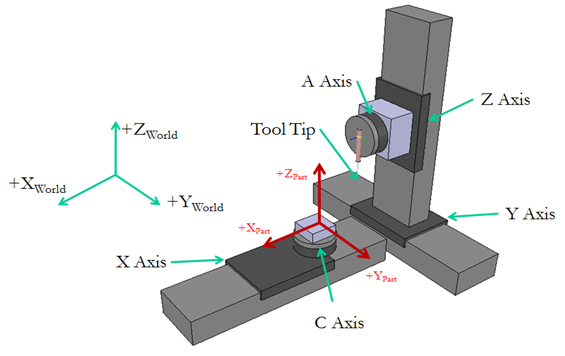
图一. 五轴系统范例
Part-Speed PSO让用户在位置回馈并非线性回馈,或者无法取得位置回馈的情况下,可以仍然使用PSO.使用Aerotech A3200 运动控制器的Part-Speed PSO,PSO输出可以基于"功能机械"相对于工件的速度命令.这个功能可以让PSO可以用于一些新的领域,例如:
1. 工件的空间坐标系与机台的移动轴坐标系不在相同的坐标系,通常原因在于:
· X/Y/Z位置命令使用动态坐标转换,例如(四轴系统, 五轴系统, 三轴雷射扫描头, 甚至史都华平台 (并联式六轴平台, Hexapods) 等等)
· 刀具垂直于工件加工使用旋转轴进行调整
· 使用非线性轴达成线性移动 (图三显示系统在Y方向运动是使用移动Y轴与旋转A轴达成)
图二. 并联式六轴平台范例(Hexapods)
图三 本范例为一套五轴系统,使用这个架构,使用者在”工件坐标系"进行X/Y/Z程序编辑,但运动控制命令最后下达的会多达五个真实轴(X/Y/Z/A/B),通常A/B轴被用于维持功能机械(刀具)与工件表面维持垂直.
2. 用于PSO硬件的编码器回馈无法取得,可能的原因包含:
· 与PSO硬件装置不兼容的讯号格式 (例如绝对式编码器或光学尺)
· 希望降低配线复杂度
如何进行Part-Speed PSO的程序开发?
以下范例使用三轴作为本范例架构:
· X与 Y轴为工件坐标系的虚拟轴
· x为真实轴 (换而言之,实际上有硬件连接的移动平台
需要了解到的,是x可能并非唯一的真实轴有进行运动命令下达,然而,x轴是唯一一轴有实际上的PSO硬件输出与配线.要达到Part-Speed PSO,主要靠的是延伸目前已经存在的A3200 指令使用:
1. PULSE SET OUTPUT 在新的软件已经可以产生一组"内部"讯号,可以被设定为PSO的"输入"
2. The PSOTRACK INPUT 指令与PSOWINDOW INPUT 指令可被设定为PULSE输出
PULSE SET OUTPUT指令是为了建立哪一个轴用来产生"被追踪"的速度命令,其被用于计算向量和.在这个范例程序中,A3200追踪了虚拟轴X与 Y轴,而PULSE SET OUTPUT指令,被用来判断哪一个驱动器会收到这个速度命令,在这个范例中,该驱动器为真实轴”x”轴.真实轴”x”轴将会收到所有的PSO指令,包含PSOTRACK INPUT指令.
设定Part-Speed PSO的范例程序
PULSESET X Y OUTPUT x
PSOCONTROL x RESET
PSOTRACK x INPUT 14
PSODISTANCE x FIXEDABS(UNITSTOCOUNTS (X, .5))
PSOPULSE x TIME 15, 14
PSOOUTPUT x PULSE
PSOOUTPUT x CONTROL 0 1
PSOCONTROL x ARM
In another recent Aerotech white paper, Customized Relationships and Coordinated Motion with AXISSTATUSFAST,
在另一篇最近的Aerotech 技术文章(Customized Relationships and Coordinated Motion with AXISSTATUSFAST),其讨论到用户如何设定进阶的动态坐标转换.虽然在本文章并非完整讨论此议题,但通常该功能"动态坐标转换"会在另外一个程序Task下运行,而Part-Speed PSO结合动态坐标转换,可以将这个最新的运动控制技术发挥出来.
由于程序内使用虚拟轴做撰写,并且使用虚拟轴的速度命令,作为PSOTRACK INPUT的速度命令,一组独立的动态坐标转换程序指令,就可以基于工作位置,有效的移动"真实轴",并且以空间中该位置进行PSO输出.
总结
Aerotech 在工业雷射加工大量被运用的PSO功能,在过去必须要取得编码器信息,或者必须要受限于轴系架构为直角坐标系,搭配新的Part-Speed PSO功能后,用户可以将PSO使用于许多更进阶的轴系架构,如四轴,五轴系统,或者并联式史都华平台,或者用于绝对式编码器回馈等特殊场合.Part-Speed PSO可以有效地降低程序复杂度,提升多轴平台场合的加工质量,达到高速度,高质量的雷射加工.
本文来源:
使用Part-Speed PSO 需要考虑的技术问题
以下为导入使用Part-Speed PSO需要考虑的技术问题
1. PULSE command pulse generator 输出的上限为24 MHz输出频率,而CountsPerUnit参数与虚拟轴的程序速度(进给速度)将会决定PULSE command pulse generator的输出频率.最高的虚拟轴程序编辑速度(FeedRate),可以由下面公式计算出来.
FeedRate = EncoderCountFreq/CountsPerUnit
1. PULSE command pulse generator 输出的上限为24 MHz输出频率,而CountsPerUnit参数与虚拟轴的程序速度(进给速度)将会决定PULSE command pulse generator的输出频率.最高的虚拟轴程序编辑速度(FeedRate),可以由下面公式计算出来.
FeedRate = EncoderCountFreq/CountsPerUnit
其中,EncoderCountFreq = 24 MHz.
2. CountsPerUnit为虚拟轴的移动分辨率,需要选择小于PSODISTANCE指令的数字.(参考上面范例程序)
3. 于Aerotech 驱动器上的PSO outputs 最高输出频率有其上限,参考Aerotech应体使用手册.使用相关的频率上限,最小的脉波间隔的计算公式如下:
MinSpacing = FeedRate/LaserOutputFreq
其中,LaserOutputFreq 也就是上述Aerotech 驱动器的最高PSO输出频率
2. CountsPerUnit为虚拟轴的移动分辨率,需要选择小于PSODISTANCE指令的数字.(参考上面范例程序)
3. 于Aerotech 驱动器上的PSO outputs 最高输出频率有其上限,参考Aerotech应体使用手册.使用相关的频率上限,最小的脉波间隔的计算公式如下:
MinSpacing = FeedRate/LaserOutputFreq
其中,LaserOutputFreq 也就是上述Aerotech 驱动器的最高PSO输出频率
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

