






长城汽车、亮道智能、Ibeo就L3/L4自动驾驶量产研发签署战略合作协议
近日长城汽车、亮道智能、Ibeo就L3/L4自动驾驶量产研发签署战略合作协议。长城汽车将选用新一代 4D 固态激光雷达ibeoNEXT,第三方测试验证商亮道智能将负责ibeoNEXT和环境感知系统在长城量产项目中的验证工作。
这是全球第一个纯固态激光雷达量产合作项目,同时也是全球范围内首个纯固态激光雷达的车规量产合作。本次长城汽车选用的4D固态激光雷达ibeoNEXT是一款不含任何运动部件且传感器轻便、结构紧凑适用于L2-L5自动驾驶系统量产项目的激光雷达。
目前以市面上现有的L2或L2+自动驾驶辅助技术来看,普遍采用的传感器是毫米波雷达+摄像头的组合,在这里先区分一下什么是自动驾驶?什么是自动驾驶辅助?按照SAE自动驾驶分级可分为六级:无自动化(L0)、驾驶辅助(L1)、部分自动化(L2)、半自动化(L3)、高度自动化(L4)和完全自动化(L5)。L4和L5分类标准的主要区别在于自动驾驶系统安全工作时,是否存在限定条件。
自动驾驶汽车需要更安全的传感器
从以上简单分类来看L1和L2只能算是辅助驾驶,L3—L5才是真正意义上的自动驾驶。
由此可见使用L2高级驾驶辅助系统的车辆在传感器选择方面,激光雷达并非是必须选择的,而L3-L5这类真正意义上的自动驾驶是否需要安装激光雷达目前还没有定论。
激光雷达是实现L3及以上自动驾驶的必须品
对于L3-L5级自动驾驶是否需要激光雷达这一问题,钛媒体采访到了亮道智能CEO剧学铭。
剧学铭表示:“ 马斯克说自己的Autopilot里面不会加入激光雷达,但是Auto Pilot是L2,按照我们的理解认为L3的项目上激光雷达是一个必须的产品,原因很简单,我们希望有一个安全的驾驶环境”。
随后剧学铭又补充说到:“L2和L3的最本质区别并不是实现多少的自动化,而是安全责任的转变,L2级的安全责任在于驾驶员身上,而L3的安全责任在于车企和传感器供应商,所以要想实现L3级以上的自动驾驶传感器的责任至关重要,不能出现一点点失误”。
要知道目前市场上主流摄像头只是作为整个感知的一套解决方案,但是要实现L3级自动驾驶时要考虑安全冗余,比如在摄像头这端要有一个备份,跟摄像头的感知能力相当,甚至更强,所以在车辆行驶安全层面上激光雷达在L3-L5级自动驾驶上是必要的传感器。
自动驾驶责任的转变
当被问到在未来的自动驾驶技术发展中对于激光雷达提出了哪些新要求和什么才是真正满足L3-L5自动驾驶使用要求的激光雷达时,剧学铭向钛媒体介绍到:“因为亮道智能的团队早期也都是做自动驾驶的软件开发,当时我们了解目前市面上的各类的传感器在感知能力上还不够好,所以也就解释了自动驾驶技术的发展中为什么固态激光雷达非常火的原因”。
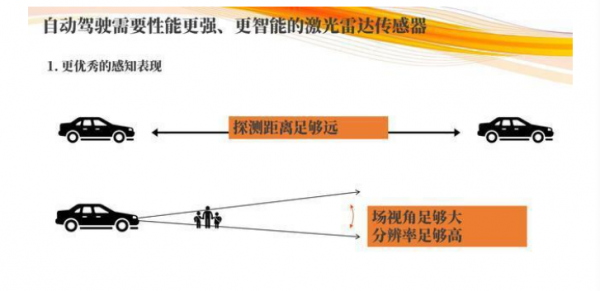
对于L3-L5从感知的要求上来说,车辆需要有更远的探测距离,特别是在高速上自动行驶时车辆需要更早知道远处的路况条件,便于探测和决策。所以从激光雷达的出发点和要求来看是要满足更远的探测距离和更广的探测视角、更高的分辨率。
从量产的角度考虑雷达需要小型化、轻量化,所以激光雷达需要高度集成化,因为量产版激光雷达需要安装在量产车型上,量产车型对于外观的要求是非常严苛的,首先车辆外观设计要符合空气动力学原理,其次需要车辆外观的整体美观度。
所以对于雷达的选型上则需要高度集成化,以上两点都对激光雷达提出了一个新的挑战。

ibeoNEXT固态激光雷达外观图
4D固态激光雷达ibeonEXT
此次三方合作选用的4D固态激光雷达ibeoNEXT是一款不含任何运动部件,传感器更轻便、结构更紧凑,适用于L2-L5自动驾驶系统的固态激光雷达。
那么什么是4D激光雷达?4D是来自于哪四项?剧学铭向钛媒体介绍到:“首先是一个三维的信息,就是传统激光雷达能够提供的X、Y、Z,然后另外一维是它的能量信息,也就是Flash通过接收器对于能量的识别可以区分能量的强弱”。
ibeonEXT 4D固态激光雷达不但可以构建具有高精度细节的3D环境模型,而且能利用能量信息显示环境图像,其涵盖道路指引信息、道路设施、标牌、交通信号灯等即三维空间内每个测量点。这也是ibeoNEXT被称为4D固态激光雷达的原因。
ibeoNEXT创建的能量信息图,和黑白摄像头记录的视频图像类似,可以与激光雷达点云信息配合同步输出, 再与其他车载感知传感器采集的信息形成冗余。

ibeoNEXT固态激光雷达创建的能量信息图
亮道自动驾驶测试验证
随着高级别自动驾驶技术逐渐走向量产,自动驾驶车辆对于安全性的需求也在发生着变化。传感器和感知融合系统的测试验证是自动驾驶量产研发过程中必不可少的环节。车企与传感器研发公司、验证服务提供商随着技术的不断发展合作逐渐紧密。
作为高级自动驾驶的验证服务提供方,亮道智能已经开始在中国与德国的研发中心同步启动了ibeoNEXT的测试验证工作,为该量产项目提供高精数据采集平台搭建、全球数据采集、关键场景提取与分析、感知能力测评等测试验证服务,并且配合ibeoNEXT和长城汽车环境感知系统如期实现SOP。
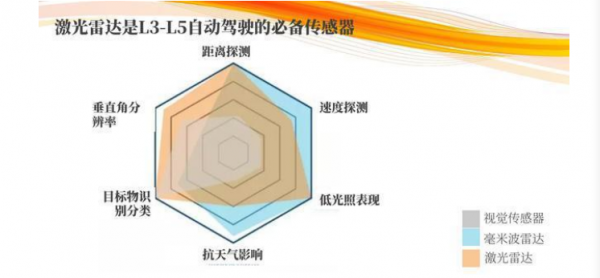
激光雷达是L3-L5必备传感器
固态激光雷达上车量产需要针对不同的汽车环境进行大量测试验证,要知道激光雷达在开始工作后的单位时间内会产生大量的数据,在激光雷达工作中会收集非常多的数据量,要想处理这些数据必须构建数据中心、在数据中心里完成对采集数据的处理与分析来实现自动化场景抓取。
环境感知算法到最终的SOP算法,需要大量的测试验证来覆盖不同的特殊场景。量产级的激光雷达算法不仅包括定位、障碍物识别与分类、动态物体跟踪等算法,还有应对各种特殊驾驶环境和路况的专门算法,同时为了保证代码和功能的安全可靠性,还要进行安全设计和大量测试验证工作。
总结
纵观全球,自动驾驶发展正处于L2到L3的过渡阶段。实现量产落地之前,我们还需要不断进行测试验证,来完善传感器的感知性能。
亮道智能CEO剧学铭认为激光雷达是实现L3-L5自动驾驶领域非常重要的一种传感器,传统机械传感器不仅体积大而且成本较高,在一定程度上影响了量产L3级自动驾驶车辆的发展,随着量产版固态激光雷达的问世,也将促进L3-L5自动驾驶技术的发展。(作者/姚圣祺)
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

