





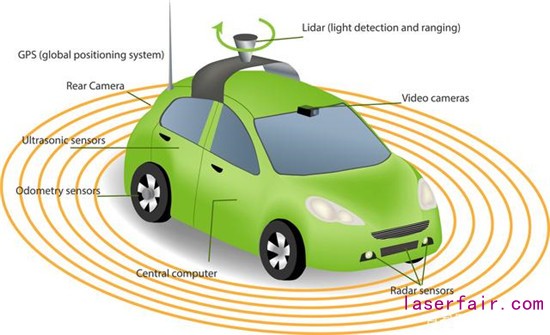
黑夜中一辆自动驾驶汽车沿狭窄的乡村公路蜿蜒行驶而来。突然间路上出现了危险警示。接下来会发生什么呢?自动驾驶车辆在通过突然出现的障碍物前,必须先发现障碍物——收集有关障碍物大小、形状和位置信息,以便用算法规划出最安全的路线。因为无人驾驶,汽车需要智能眼,也就是解决问题的探测器——无论周围环境、天气如何,或者天有多黑——问题要在眨眼间解决。
技术难度要求虽高,但也有解决方案,该方案是由两样东西组成:特殊激光探测技术 LIDAR和集成光电技术,即实时联网的微通信技术。要了解特殊激光探测技术 LIDAR,需要先了解与此相关的技术——雷达。在航空领域,雷达天线向飞机发射无线电脉冲或微波,通过计算波束返回时长来确定飞机位置。但这一种观察方式很有限,因为大光束脉冲或微波无法显示微小的细节。相反,自动驾驶汽车的 LIDAR 系统使用窄带不可见红外激光,LIDAR 是光探测和测距的缩写。它可以将极其微小物件成像,如街对面行人衬衫上的扣子。
但是,我们如何确定这些物件的形状或距离呢?LIDAR 发射一系列超短激光脉冲去探测距离。以乡间小路上的驼鹿为例,汽车驶过时,一个 LIDAR 脉冲遇到鹿角的根部后散开,它反弹回车辆之前,下一个脉冲可能已到达一个鹿角的顶端。测量这两个脉冲返回的时长差,可得到有关鹿角形状的数据。通过发射大量短脉冲,LIDAR系统可快速得出物体详细轮廓。
打开再关上激光器是产生光脉冲最简便的方法,但会造成激光束不稳定,并影响发射脉冲的精确频率,影响距离测量准确性。更好的办法是让激光器开着,用其他东西定期、快速地阻挡光线。这就是集成光子技术。互联网的数字数据是由精确定时的光脉冲承载的,有的脉冲短至一百皮秒。一种产生光脉冲的方法是使用马赫-曾德尔干涉仪,该设备利用特定的波特性,称为干扰特性。
想一下将一些鹅卵石扔进池塘的情景:涟漪扩散和交叠构成了一种花纹,某些地方的波峰叠加,变得非常大;而其他地方,则完全抵消了。马赫-曾德尔干涉仪的原理与此类似。先将光波沿 2 个平行臂分为 2 束,然后合二为一。如果一束光减慢而延迟,因为 2 束光不同步,合并后的抵消现象就阻挡了光线。通过切换一束光的延迟,干扰器就像一个开合的开关,发射出光脉冲。
持续一百皮秒的光脉冲可以探测到小至几厘米厚的物体,但未来的汽车需要更高的分辨率。将干扰器与超灵敏、反应快的光探测器配对,可将分辨率提高到毫米级。比我们以正常视力看街对面的物体,要好一百倍以上,第一代自动驾驶汽车的 LIDAR依赖车顶或发动机盖上的复杂旋转组件进行扫描。借助集成光子技术,干扰器和探测器可缩小至不到十分之一毫米,装在小巧的芯片中,将来可以放在车灯里。这些芯片还将包括干扰器智能调节器。这个额外设备的作用不像开关,更像一个调光器,如果许多带微型控制延时的平行臂并列排放的话,就设计出了新的特性:可操纵的激光束。有了这些新优势,这些智能眼的探测和观察比能想到的任何自然的东西更彻底——帮助导航通过任何数量的障碍物,不费吹灰之力。如果喜欢小编的内容,可以点赞评论转发呦,您的评价就是我的动力。(版权申明:图片均来自于网络,如有侵权,请联系删除)
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

