




即使有了先进的摄像头和激光扫描仪,可以留意到周边的所有车辆,但自动驾驶车辆在浓雾中驾驶仍然困难,存在变“瞎”的隐患。然而,这种状况很快将得到改善,据《激光制造商情》了解,日前斯坦福大学的研究人员已经发明了一种新的成像系统,可以透过浓雾之类的障碍物,或者重建另一侧的障碍物。
光可以穿过雾气,但当光子穿过厚厚的湿气云层时,它们会发生偏移与重新定向,并且不会从另一侧看到可识别的物体,即使是一些人眼可以察觉和辨别的结构物体。此外,泡沫等其他材料也会以类似的方式散射光线——斯坦福大学的研究人员在开发新的成像设备时用泡沫作为浓雾的替代品。
他们在杂志《自然通讯》上发表的一篇论文《Three-dimensional imaging through scattering media based on confocal diffuse tomography》中分享了研究的细节:其工作方式类似于激光驱动的激光雷达扫描仪,自动驾驶汽车可以用这种扫描仪对周围的世界进行三维成像。强大的激光在障碍物上来回扫描(他们在研究时用的是一块一英寸厚的泡沫墙),而高度敏感的光子探测器可以记录任何穿过泡沫的光子,光子击中隐藏在另一边的物体,然后再穿过障碍物反弹。
可以想象,与每秒发射的激光相比,很少有光子能够返回探测器,但是研究人员开发了一种辅助硬件的定制算法,该算法不仅考虑到光子击中探测器的时间,还考虑到它们对传感器的影响——包括散射光子,它们的往返行程并不是一条直接的路径。
尽管该算法所能提供的信息非常少,特别是与自动驾驶汽车中的LIDAR系统每秒处理的大量数据相比,它仍然能够创建隐藏在障碍物后面的物体的三维结构,这是人眼在相同的情况下无法分辨的,所以它的精确性是惊人的。
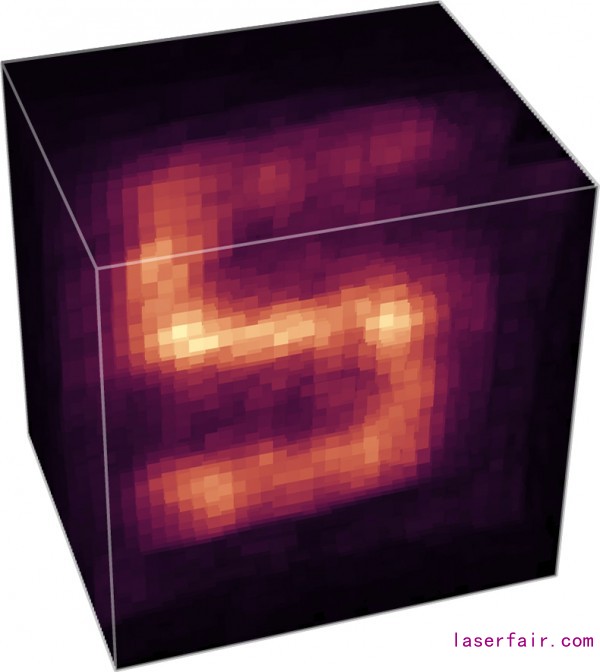
从1英寸厚的泡沫中可以看到反射字母“ S”的三维重建
但是,这项技术是否已准备好在上路的自动驾驶汽车中实施了吗?不完全是。在测试过程中,虽然定制算法可以实时地处理数据并生成隐藏对象的三维结构,但扫描过程需要花费一分钟到一小时不等,具体取决于隐藏对象的反射率。他们测试的装置也只扫描了一小部分视野,而一辆自动驾驶汽车需要能够视觉化,才能安全地在雾蒙蒙的环境中“航行”。
在雾天自动驾驶汽车能够安全地行驶在路上,即使是标称速度,也仍需要改进以使其成为实时可行的解决方案。不过,这项技术还有其它一些更直接的应用,包括详细和准确的医学成像,而无需医生采取有创性探索手术。而且,在未来,航天探测器也可以携带成像设备,并依靠这种技术在一个遥远星球的大气层中透过云层和其他微粒,而不必实际降落在地面上。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读





















 关注我们
关注我们

