






芬兰拉彭兰塔工业大学机械工程系焊接工艺与激光加工实验室
摘要:
高功率、高光束质量光纤激光的应用使远程激光焊接(RLW)工艺得到迅猛的发展。本文对远程激光焊接的原理进行了总结,作为一种极具应用前景的工艺技术,RLW加工的灵活性好、速度快、周期短,并可用于多种领域。本文阐释了高功率光纤激光远程焊接的典型特性,并研究了激光功率、焊接速度、保护气体、光束倾角、焦点位置等工艺参数对焊缝质量的影响。
关键词:远程激光焊接、扫描仪、光纤激光器、工艺参数
1. 简介
远程激光焊接技术(RLW),作为一种非接触式机器人激光焊接工艺,近些年已经获得了较大发展,并被应用于提高激光焊接工艺的生产效率,改善其加工的灵活性[1]。RLW的试验研究工作最早出现于1996年,由John Macken提出[2]。RLW的主要特征是长焦距(可达1600mm)、高功率、高光束质量激光源与振镜扫描装置的完美结合[3-5]。与传统激光焊接工艺相比,RLW加工的灵活性更好,速度更快,周期更短[3,6]。
一直以来,RLW技术研究工作被应用于各种类型的激光器,例如,文献[1]应用CO2激光和Nd: YAG激光,文献[7]采用Nd: YAG激光和碟片激光进行RLW试验,文献[6,8]则开始采用高功率光纤激光进行RLW试验研究。波长1080nm的高功率光纤激光不仅能够实现激光束的光纤传输,还能够强化加工的灵活性及聚焦的精准度。而CO2激光器由于波长较长(10.6μm),所以生成的光束不可能通过光纤传输[7]。高功率光纤激光因其合适的波长及优良的光束质量,在RLW应用领域具有无可比拟的优势,是取代传统CO2激光和Nd: YAG激光的理想选择。
RLW的工作原理是通过振镜扫描对激光光束进行反射和定位,使其以高速传输到工件表面[9]。现在,在RLW领域应用最为广泛的是2D扫描。2D扫描单元其实是一个振镜系统,包含两个可电动旋转的轻型扫描镜。该系统可处理5kW输出功率,比3D扫描更经济[10]。
虽然这种工艺尚未广泛普及,但是毫无疑问,RLW在汽车行业拥有巨大的应用潜力,比如座椅、白车身、内部结构的焊接等。在白车身生产中,RLW的实用性强、加工周期短,完全可以取代电阻点焊。
当然,RLW也面临着诸多挑战, 比如对预加工的要求、对焊接质量和稳定性的要求、需要提供保护气体、需要特别注意镀层薄板的夹持和定位等[11,12]。与传统的激光焊接相比,RLW需要关注的工艺参数更多。这些参数大致可以分为光束质量、加工参数及材料属性三大类[6]。
2. 远程激光焊接工艺
2.1. 工艺原理
RLW的理念并不是特别新奇,其原理主要是通过扫描仪,在工件上方一定距离对聚焦的激光光束进行反射和定位,焦距通常在1000~1600mm之间[13]。1996年,John Macken进行了第一次RLW试验,采用焦距为1600mm的激光实现了小孔模式焊接,该试验被认为是RLW工艺发展史上的里程碑[11]。扫描仪能够帮助激光光束正确投射在面积为1m×1m,甚至是超过2m3的大型工件上,焊接速度可达30m/min[14]。
一般RLW工艺有两种工作模式:集成扫描仪的RLW系统和基于机器人的RLW系统。集成扫描仪的RLW系统是利用一个扫描单元(一般为2D扫描仪)对激光光束进行定位和聚焦,如图1(a)所示[11];而基于机器人的RLW系统则是指通过一个长焦距激光光学镜与一个六轴机器人完成操作,由机器人负责激光光束在工件表面的定位,如图1(b)所示[11]。
与基于机器人的RLW系统相比,集成扫描仪的RLW系统可应用于多种领域,且加工周期更短,精准度更高,但是这种系统对激光光束的质量要求也比基于机器人的RLW系统高很多。表1为集成扫描仪的RLW系统和基于机器人的RLW系统与传统激光焊接的性能比较。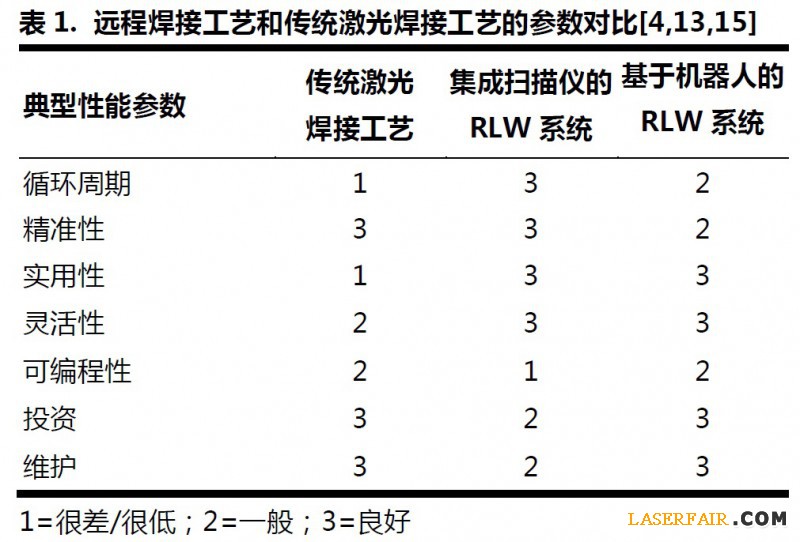
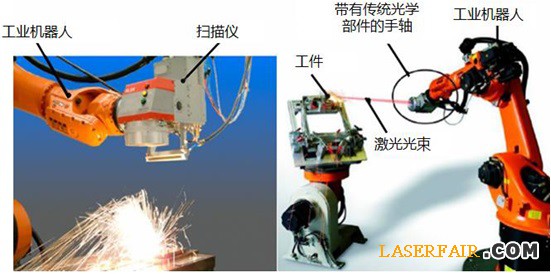
图1. 集成扫描仪的RLW系统(a)和基于机器人的RLW系统(b)[11]
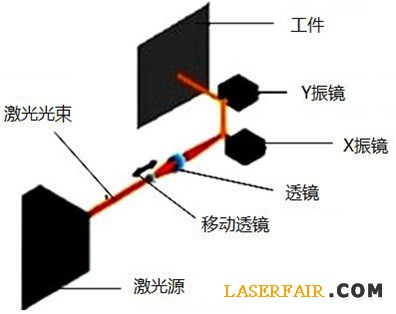
图2. 构成扫描头的典型元件[9]
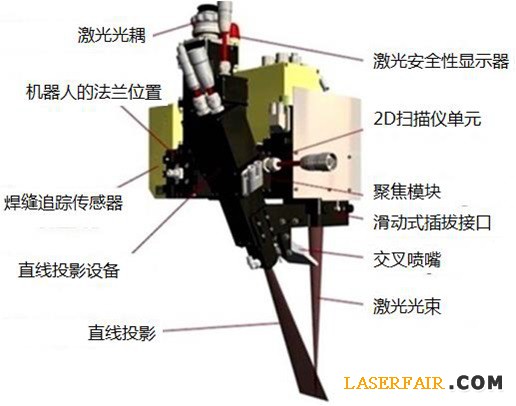
图3. 2D扫描仪系统的主要部件
阅读全文,点击链接:http://www.laserfair.com/ebook/201506/pdf/d4.pdf
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

