





本文编译自Voyage,作者是Oliver Cameron,他是Udacity前副主席,创办了自动驾驶公司Voyage,并任职CEO。Voyage已经取得了加州车辆管理局(DMV)的路测许可,是无人驾驶领域的新星。该文详细介绍了激光雷达作为无人驾驶关键核心零部件的重要性和原理。

图:voyage
最近,我们在Voyage 上分享了一些关于Homer的新闻,它可是我们的第一辆无人驾驶出租车。为了更好地来实现理解和导航的目的,我们给Homer配备了全方位的传感器,而其中起关键作用的就是LIDAR(激光雷达)。而在接下来的这篇文章中,你将会了解更多有关LIDAR的信息——它在无人驾驶汽车领域的起源,以及它是如何与其他传感器堆叠的。好吧,我已经迫不及待地想和你们分享了……
“超能力”
LIDAR可以使无人驾驶汽车(或任何机器人)能够用一些“超能力”来观察世界:
持续360度的能见度:想像一下,如果人类的眼睛可以全天候的看到四面八方。
精准的深度信息:假设,而不是猜测,你总是可以知道与你相关的物体的精确距离(精度为±2cm)。
如果你曾经看到过一辆无人驾驶汽车,那么,你很有可能已经看到了一个LIDAR传感器。通常,它就是一个安装在车顶上并在不断旋转的大块头盒子。就像下图中,在百度无人驾驶汽车上的那样。

图:百度研究院
市场上最受欢迎的LIDAR传感器之一是高功率Velodyne HDL-64E传感器。下图就是安装在Homer上的Velodyne HDL-64E传感器。

图:voyage
LIDAR如何工作的?
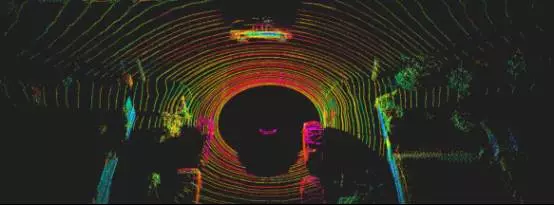
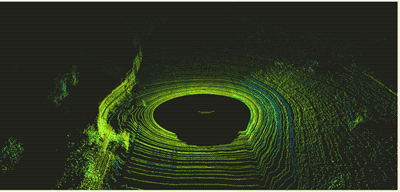
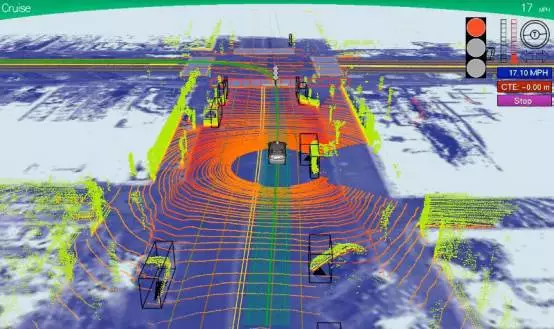
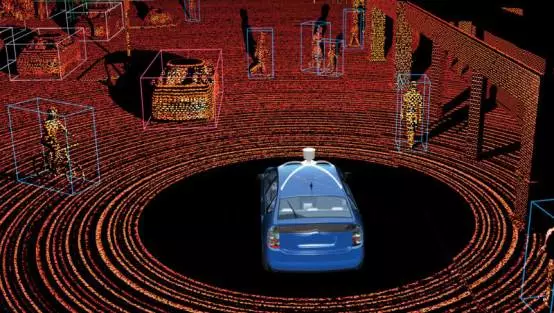
一个具有360度视觉和准确深度信息的传感器是如何工作的呢?简单地说:激光雷达传感器不断地发射出激光光束,然后测量出光线返回传感器所需要的时间。

通过每秒发射数百万光束,来自LIDAR传感器的测量能够实现真正3D世界的可视化。通过它,你可以推断出你周边任何物体的精确测量值(可高达约60m,这取决于你选择的传感器)
激光雷达的简史
如果你想要了解为什么如今的激光雷达工具受到那么多的拥护和支持,那么,很重要的一点就是要看看其他有着类似目标的类似技术。
·声纳
可以这样说,最原始的深度感知机器人是蝙蝠(5000万年前!)。蝙蝠(或海豚等)能够使用回声定位来执行与LIDAR相同的功能,也称为声呐(声音导航和测距)。声纳使用声波来测量距离,而不是像LIDAR那样测量光束。
历经5000万年的生物排他性,随着潜艇战争的到来,第一次世界大战推进了人造Sonar传感器首次大规模部署的时间表。声纳在水中表现非常出色,在水中,声音的传播要比光或无线电波更好(这个我们稍后详细介绍)。而目前,声纳传感器主要用于汽车行业,最主要的是以传感器的形式。这些短距离(约5米)的传感器能够以便捷的方式了测量出你的车与后面墙之间的距离。可是声纳没有被证明能够在无人驾驶汽车需求的种类(60m以上的距离)上工作。
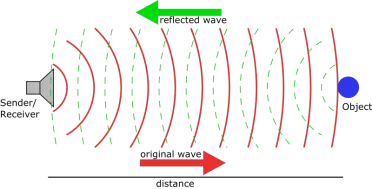
在这种情况下,蝙蝠既是发送者也是接收者
·雷达
雷达(无线电方向和范围),和声纳一样,这是在臭名昭着的世界大战期间开发的另一种技术(这是第二次世界大战期间产生的)。它使用无线电波来测量距离,而不是使用光或声波。我们在Homer上使用了很多雷达(德尔福传感器),这是一种经过验证的方法,可以精确检测和跟踪距离物体的距离。下图是部署在Homer上的雷达。

图:voyage
雷达没有很多的缺点,它不仅在极端天气条件下可以表现良好,而且价格区间比较合理。雷达不仅可以用于检测物体,而且还可以追踪它们(例如:追踪汽车的行驶速度以及方位)。也许雷达并不会像LIDAR那样给出那么多的细节,但雷达和激光雷达都是奉送的,而且他们之间绝对不是那种可以代替的关系。
·LIDAR(激光雷达)
激光雷达诞生于20世纪60年代,也就是在激光诞生之后。在1971年的阿波罗15号任务期间,宇航员绘制了月球表面的图景,让激光雷达在公众面前首次亮了相,了解激光雷达可以用来做什么。
在激光雷达被证实可以用于汽车和无人驾驶之前,激光雷达的受欢迎的用例之一是考古学。激光雷达为绘制大面积的土地提供了大量的价值,考古学和农业都从中受益匪浅。
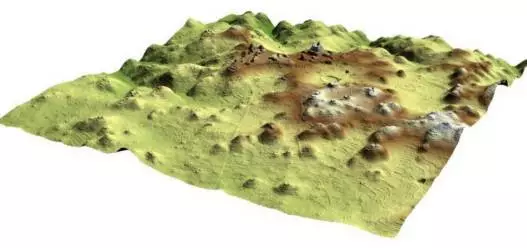
一个在空中拍摄的雷达地图
团队成员Steve Leisz教授告诉英国广播公司,“当激光雷达首次在 Angamuco中投入使用时,我们不知道这个地区有多大,它是不是包括建筑物和建筑物,或者它也许甚至是一座城市。”也许更令人惊讶的是,球队还发现了一个名为pok-ta-pok的中美洲游戏的球场,以及金字塔。“这是完全是一个惊喜,” Leisz说——雷达考古学在未知领域闪闪发光。
直到二十一世纪初,LIDAR才开始被用于汽车领域,在2005年的大DARPA挑战赛中,它因Stanley(以及后来的Junior)而闻名于世。
2005年Grand DARPA挑战赛的胜利者Stanley除了使用军用级GPS、陀螺仪、加速度计和前置摄像机(视线可达80米以上)外,还采用了安装在车顶上的5台SICK LIDAR传感器。所有这一切都是由坐在后备箱中的6台1.6GHz Pentium Linux电脑支持的。
SICK LIDAR(其在2005年的挑战赛中占有重要地位)所面临的主要挑战是每次激光扫描基本上都是横向切割,因此你必须在有针对性的指导下进行操作。许多团队将它们安置在倾斜阶段,以便使用它们“扫描”一段空间。简单来说:我们今天所知道的SICK是一个二维激光雷达(一个方向上的几束光)与现代3D激光雷达(所有方向的多束光)。
Velodyne

图:Velodyne
Velodyne长久以来都是LIDAR的市场领导者,但是最初他们没有以这种方式为生。在1983年,Velodyne是以一家音响公司进入大众视野的,专门从事低频声音和低音炮技术。低音炮包含定制传感器,DSP和定制DSP控制算法。在Stanley首次亮相的同时,Velodyne也成为我们今天所熟知的激光雷达公司。2004年,Velodyne创始人David和Bruce Hall首次以DAD团队(Digital Audio Drive)的名义进入2004 DARPA比赛。在2005年的第二场比赛中,大卫·霍尔(David Hall)为基于3D激光的实时系统发明了专利,为Velodyne当前的LIDAR产品奠定了基础。2007年第三次DARPA挑战,大多数团队使用这种技术作为其感知系统的基础。David Hall的发明现在已经成为史密森尼史密斯(Simonsonian)作为实现自主驾驶的基础性突破。
LIDAR在无人驾驶汽车中的巨大前景
为什么激光雷达能够给无人驾驶汽车带来腾飞?一句话:测绘。LIDAR允许你生成巨大的3D地图(其原始应用程序),然后你就可以预测内部导航汽车或机器人。通过使用激光雷达来对环境进行绘图和导航,你可以提前知道一条通道的边界,或者在500米前是否有停车标志或交通信号灯。这种可预测性正是无人驾驶汽车所需要的技术,是过去5年来无人驾驶汽车取得进步的重要原因。
·对象检测
由于激光雷达已经变得具有更高分辨率并且可以在更长的范围内运行,所以在对象检测和追踪出现了新的用例。LIDAR地图不仅可以准确地知道你在世界上的位置,还可以帮你导航,与此同时,它也可以检测和追踪汽车、行人等障碍,并且,根据Waymo的消息,根据足球头盔也是可以进行检测和追踪的。
现代激光雷达使你可以区分一个人是在骑自行车还是在步行,甚至可以检测出他的行驶速度以及前行的方向。
这真是惊人的导航能力,可预测性和高分辨率—对象追踪的结合意味着LIDAR是今天无人驾驶汽车中的关键传感器,很难去想象那个主控因素发生改变,除非……
摄像头驱动的无人驾驶
有一些初创公司在那里使用纯摄像机(也可能是雷达)解决无人驾驶驾驶汽车的问题,而没有将激光雷达考虑在内。特斯拉便是这类人中最大的一个,而Elon Musk反复强调,如果人类用眼睛、耳朵和大脑来感知和浏览世界,那为什么汽车不可以呢?我肯定这种做法会取得令人惊喜的结果,特别是其他有才华的团队都在为实现这一目标而不懈努力着,这其中就包括Comma和AutoX。
值得注意的一点是,特斯拉有一个有趣的约束,这可能影响他们的决策:规模。特斯拉希望不久能够在一年内生产出50万辆汽车,而且迫不及待地希望LIDAR明天就能降低成本(或者制造成本),真希望这个在昨天就发生了!
激光雷达的未来
这个行业正在向前迈进,着重点在于:成本在降低,分辨率和范围在增加。
·成本降低
固态激光雷达开辟了低于1K美元强大的激光雷达装置的潜力,而这个在今天可能每单位需要高达80k美元。LeddarTech是这个早期市场的领导者之一。
这是Velodyne所讲述的有关固态(solid-state)激光器的观点:
固态激光,由你希望以尽可能低的成本获得最小尺寸的嵌入式传感器驱动的固定传感器。当然,这也意味着你有一个较小的视野。而Velodyne是同时支持固定和环绕视图传感器的。固定传感器被小型化以便为了更好的嵌入。从成本的角度来看,它们都包含透镜、激光和检测器。最低成本系统实际上是通过环绕视图传感器来实现的,因为不断的旋转可以在整个视野范围内重新使用镜头、激光和检测器。这种重复使用既是最经济的,也是最强大的,因为它可以减少与实时合并不同观点相关联的误差——这是当车辆正在快速移动时真正计数的。
·分辨率和范围增加
LIDAR申请数量的巨大增长带来了在这一领域的创业公司的大量有才华的创始人和团队。更高的分辨率输出和增加的追踪范围(在某些情况下为200m)将提供更好的对象识别和追踪,而这是与像Luminar这样的创业公司的传感器的关键区别之一。
Voyage下注了激光雷达。我们喜欢它带来的所有好处,相信生态系统将会及时降低成本,因为我们需要扩大自主的出租车服务。如果你是LIDAR的创业公司,并且想要测试你的传感器,我们很乐意成为你的第一批客户之一。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

