



2019年中国科学院大学Bo Yu教授团队提出利用3D打印光固化的方法可制造出形状复杂且变形可控的水凝胶结构,图1为该研究的实验装置图与自弯曲、自扭曲变形示意图。通过热响应式水凝胶内引入的凹槽微结构,即通过在水凝胶结构侧面引入二级微结构导致结构不对称膨胀从而引起变形的原理,形成弯曲、扭转、甚至模仿植物卷曲、花瓣和八爪鱼等复杂变形。该方法最为重要的,是将刺激响应性材料与3D打印相结合,可以实现刺激响应式的形状变形,例如热响应抓持器,可通过温度控制实现了物品的抓取和释放。由于材料的多样性、结构设计的灵活性以及3D打印的简便性,该研究为软机器人、组织工程等创建复杂的形状变形架构开辟了新道路。
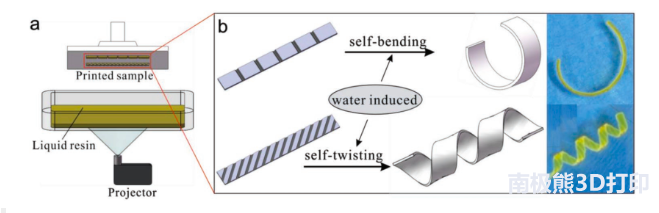
图1 a实验装置,b自弯曲、自扭转变形示意图
该研究探究了曝光时间、水凝胶结构引入的凹槽特征对最终结构的弯曲和扭转角度的影响以及温度对结构恢复原样的时间的影响,发现(1)曝光时间越短,水凝胶结构弯曲角度越小。其原理为更高的固化时间导致更高的反应转换率,更高的转换率会有更高的弹性模量,表现为更紧密的交联结构,所以会产生较小的弯曲角度和较低的不对称力。经过实验探究,合适的曝光时间为8s。(2)当结构层和基底层制件的厚度比保持恒定时,对于具有较小倾斜角的较窄和较薄的条带需要较短的时间扭转到一定角度。也就是随着凹槽厚度与宽度减少,扭转扭矩会减少,扭转速度会增加凹槽的厚度越小、宽度越小、倾斜方向越小,扭转角度越大;(3)水温越高,结构恢复原貌的时间就越短。常温水中的恢复时间大约为60℃水中恢复时间的8倍。
研究学者应用该方法制造出了热响应抓手,抓取与释放过程如图2所示。抓手结构在冷水中收缩,可实现对0.15g空心球的抓取,离开冷水时,抓手对球的抓力克服了抓球的重力以及抓球与水的相互作用力,使得抓手可成功的将抓球转移到热水中。抓手在热水中舒张,实现了0.15g的空芯球体的释放。该案例显示出3D打印与热响应材料相结合,为软体机器人的开发提供了新的思路。
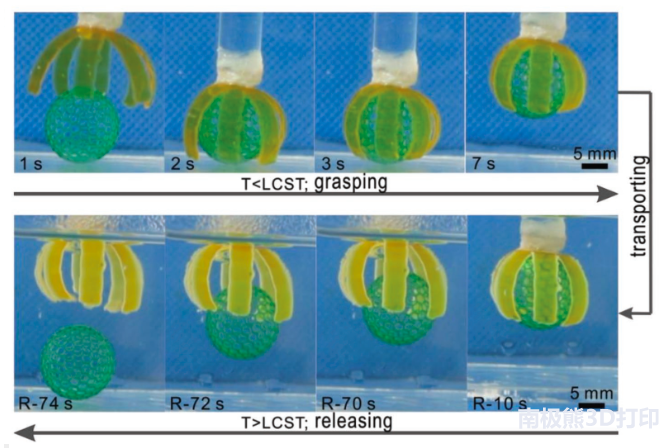
图2 抓手的抓取球体与释放球体示意图
参考文献:
Ji Z, Yan C, Yu B, et al. 3D Printing of Hydrogel Architectures with Complex and Controllable Shape Deformation[J]. Advanced Materials Technologies, 2019: 1800713.
图1 a实验装置,b自弯曲、自扭转变形示意图
该研究探究了曝光时间、水凝胶结构引入的凹槽特征对最终结构的弯曲和扭转角度的影响以及温度对结构恢复原样的时间的影响,发现(1)曝光时间越短,水凝胶结构弯曲角度越小。其原理为更高的固化时间导致更高的反应转换率,更高的转换率会有更高的弹性模量,表现为更紧密的交联结构,所以会产生较小的弯曲角度和较低的不对称力。经过实验探究,合适的曝光时间为8s。(2)当结构层和基底层制件的厚度比保持恒定时,对于具有较小倾斜角的较窄和较薄的条带需要较短的时间扭转到一定角度。也就是随着凹槽厚度与宽度减少,扭转扭矩会减少,扭转速度会增加凹槽的厚度越小、宽度越小、倾斜方向越小,扭转角度越大;(3)水温越高,结构恢复原貌的时间就越短。常温水中的恢复时间大约为60℃水中恢复时间的8倍。
研究学者应用该方法制造出了热响应抓手,抓取与释放过程如图2所示。抓手结构在冷水中收缩,可实现对0.15g空心球的抓取,离开冷水时,抓手对球的抓力克服了抓球的重力以及抓球与水的相互作用力,使得抓手可成功的将抓球转移到热水中。抓手在热水中舒张,实现了0.15g的空芯球体的释放。该案例显示出3D打印与热响应材料相结合,为软体机器人的开发提供了新的思路。
图2 抓手的抓取球体与释放球体示意图
参考文献:
Ji Z, Yan C, Yu B, et al. 3D Printing of Hydrogel Architectures with Complex and Controllable Shape Deformation[J]. Advanced Materials Technologies, 2019: 1800713.
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读





















 关注我们
关注我们

