




徐忠扬,张洪祥,陈凯,潘时龙
南京航空航天大学雷达成像与微波光子技术教育部重点实验室
摘要:调频连续波激光雷达将调频连续波测距与激光探测技术相结合,具有测距范围大、距离分辨率高、可进行多普勒测速、有利于片上集成等优点。本文首先对调频连续波激光雷达的测量原理进行分析。随后,根据光源不同将调频连续波激光雷达分为三类,分别对其技术特点和研究现状进行阐述。最后,对目前调频连续波激光雷达的前沿应用进行了简单介绍。
关键词:调频连续波激光雷达;测距;激光探测
激光雷达作为雷达概念的一种延伸,利用激光进行目标探测,从反射光中获取目标距离、速度、方位等信息。相较于微波雷达,激光雷达采用波长更短的光学信号,具有定向性好、空间分辨率高、抗干扰能力强、体积小、重量轻等优点。自上世纪60年代以来,激光雷达得到了迅速发展,在遥感、大气探测、自动驾驶、三维成像等领域获得了广泛应用。根据发射信号不同,激光雷达可以分为两类:脉冲激光雷达和连续波激光雷达。脉冲激光雷达采用脉冲光信号作为探测信号,通过精确测量反射光脉冲飞行时间,获取目标距离信息。脉冲激光雷达分辨率相对降低,为了提高距离分辨率,需要使用低时延抖动的短脉冲以及超快光电子器件等。同时,脉冲激光雷达一般采用直接探测获取回波信号,无法进行多普勒测速;较高的脉冲功率也对器件性能和人眼安全性提出了要求。
连续波激光雷达采用连续光信号作为探测信号,具有峰值功率低,分辨率高等特点。具体而言,连续波激光雷达又可分为相位式激光雷达和调频连续波激光雷达。前者基于相位激光测距技术,采用单频信号调制激光,通过对反射光信号进行鉴相,最终获得目标距离信息。该方法的缺点是存在模糊距离,测距范围受限于调制频率。调频连续波激光雷达则是将现代雷达技术中的调频连续波测距与激光探测技术相结合。该技术采用线性调频信号调制激光,并通过比较反射光信号和本振光信号的瞬时频率差获得目标距离信息。同时,连续波激光雷达一般采用相干接收,探测运动目标时,测量信号中会引入光学多普勒频移,一方面会对测量结果产生影响,另一方面也可利用多普勒效应对目标进行实时测速。
随着激光技术、微波光子技术、光通信技术等相关领域的不断发展,调频连续波激光雷达受到越来越多的关注。相较于脉冲激光雷达,调频连续波激光雷达具有如下技术优势:①测距范围大;②距离分辨率高;③可实现多普勒测速;④有利于片上集成。
得益于以上技术优势,调频连续波激光雷达已经在高精度三维成像,遥感测绘和自动驾驶等领域得到了应用。当前飞速发展的集成光子技术,也为调频连续波激光雷达注入了新的活力,片上集成将成为调频连续波激光雷达的重要发展趋势。
本文将首先对调频连续波激光雷达的探测原理进行阐述。随后,根据系统中采用的激光光源对调频连续波激光雷达特点进行分类阐述。最后,将对调频连续波激光雷达的前沿应用进行简单介绍。
1 调频连续波激光雷达测量原理
现代雷达系统中通常采用线性调频微波信号作为探测信号,通过比较回波信号与参考信号的瞬时频率,获得目标距离信息。调频连续波激光雷达便采用了与之相似的技术,利用线性调频光信号作为探测信号。典型的调频连续波激光雷达系统如图1所示。该系统中核心组件是能够产生线性调频光信号的激光光源。该光源可以是内调制激光光源、啁啾脉冲激光光源、外调制激光光源等。线性调频光信号经由光学分束器进行分束,其中一路作为本振光信号,另一路作为探测信号由光学准直系统照射到目标表面。待测目标的反射光信号由光学准直系统接收,通过光纤环形器和光纤耦合器后,与本振光信号合束,并通入光电探测器中进行相干拍频。最终,信号处理系统从光电探测器的光电流信号中提取目标距离和速度等信息。
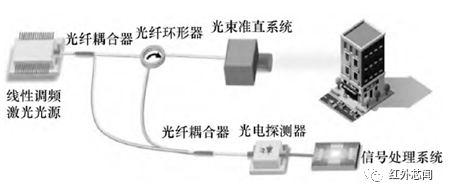
图1 调频连续波激光雷达系统图
调频连续波激光雷达的测量原理如图2所示。由于探测光信号为线性调频信号,其瞬时频率与时间成线性关系。当回波延时存在时,反射光信号与本振光信号间将产生正比于回波延时的瞬时频率差。在实际激光雷达系统中,该差频信号由反射光信号与本振光信号相干拍频获得。相干拍频时,光电探测器产生的光电流信号进行低通滤波后,通过信号处理,即可获得反射光信号的回波延时及目标距离信息。
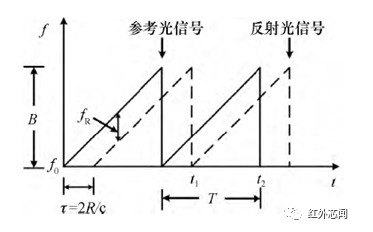
图2 调频连续波激光雷达测距原理
若探测光信号波形选取为锯齿形线性调频信号,其瞬时频率可表示为:

式中,f0为光信号的初始频率,B为光信号的调制带宽,T为光信号的调制周期。此时,通过低通滤波后的光电流信号具有如下形式:
式中,A为光电流信号的幅度,t为回波延时,φ为恒定相位。由式(2)可知,光电流信号的频率正比于回波延时。因此,若已知光电流信号频率,即可利用如下关系获取目标距离信息:

式中,c为真空中光速。进一步分析可知,调频连续波激光雷达的距离分辨率则取决于光信号的带宽,两者之间具有如下关系:

因此,为了获得更高的距离分辨率,调频连续波激光雷达需要具有更大的调制带宽。
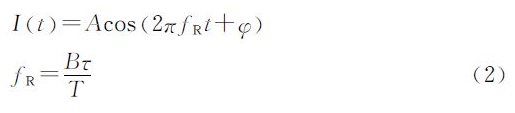
上述测量原理中,待测物为静止目标。当待测目标为运动物体时,回波信号将产生多普勒频移。多普勒频移与差频信号叠加,结果如图3所示。此时,光电流信号将表示为:

式中,fd为光信号的多普勒频移。激光雷达中,光信号的多普勒频移较高,将严重影响调频连续波激光雷达的性能。因此,距离和速度的解耦是调频连续波激光雷达中的是重要问题之一。
图3 三角波形调频连续波激光雷达测距测速原理
一种有效的解决方案是在调频连续波激光雷达中同时产生正负双啁啾的光学信号。具体可通过三角波形线性调频信号和双边带调制的方法实现。图3以三角波形线性调频信号为例进行说明。在正啁啾阶段,相干拍频产生的光电流信号仍然具有式(5)所示形式,而在负啁啾阶段,光电流信号的表达形式变为:

因此,最终获得的拍频信号将由两个单频信号组成,其频率分别为fR+ fd和fR - fd,计算二者和与差即可分别得到fR和fd,并由此获取目标距离和速度信息。当然,在三角波形线性调频信号下,两个单频信号实际上分处于不同时段,无法实现真正意义的实时测量。利用双边带调制同时产生正负双啁啾信号,则可实现对距离和速度的实时测量。
2 调频连续波激光雷达的分类
调频连续波激光雷达的核心组件是能够产生线性调频光信号的激光光源。目前已有报道的调频连续波激光雷达中,激光光源可分为三类:内调制激光光源,啁啾脉冲激光光源以及外调制激光光源。本文将根据激光光源的不同对调频连续波激光雷达进行分类,并分别介绍其特点和发展现状。
2.1 基于内调制激光光源的调频连续波激光雷达
调频连续波激光雷达中,为了获得线性调频光信号,可采用能够直接产生啁啾光信号的内调制激光器。具体又可分为两类:第一类是采用线性调频信号调制激光光强。此时激光器输出光强为线性调频信号;第二类则通过调制信号改变激光频率,光场本身为线性调频信号,该类激光器又称为扫频激光器。其中,第一类激光器调制方式简单,一般采用直接探测获取回波信息,探测距离较短。同时,调制过程中激光频率也会改变,影响测量结果。第二类激光器调制带宽较大,但受限于激光调谐机理,扫频速度较慢。同时,调制信号与激光瞬时频率之间往往存在非线性关系,需要进行频率校准。
强度调制激光器是最早提出并应用于调频连续波激光雷达的激光光源。1996年,美国海军实验室的研究人员采用强度调制GaAIAs激光器结合直接探测,实现了激光测距,并在此基础上演示了激光三维成像。随后,研究人员采用相似的方法,实现了对大气气溶胶等随机分布介质的探测。相较于强度调制激光器,扫频激光器具有更大的带宽,可实现更高的分辨率,因此在高精度测距中应用更为广泛。2009年,美国研究人员采用外腔半导体激光器作为调频连续波激光雷达光源,激光器调谐范围达到100nm。在1.5m的距离下,该系统实现了31um的距离分辨率和86nm的测距精度。2013年,美国国家标准局的研究人员采用光频梳校准外腔激光器,构建调频连续波激光雷达,实现了130um的距离分辨率。由于采用光频梳进行校准,该方法克服了扫频激光器扫描速度慢的劣势,具有1kHz的更新速率。2018年,日本研究人员则采用低成本的VCSEL激光器作为调频连续波激光雷达光源。实现了距离分辨率360um、精度2um的高精度测距。该系统中采用VCSEL激光器,大幅降低了调频连续波激光雷达的成本和复杂度。
由于扫频激光器在分辨率上具有明显优势,当前的研究主要采用第二类方案。但是,扫频激光器同时也面临着严重的非线性问题。调频连续波激光雷达的测量原理要求光信号的瞬时频率与时间呈线性关系。然而,自由运转的扫频激光器一般难以实现良好的线性扫频。扫频过程存在的非线性效应将会严重影响系统性能,导致距离分辨率和测距精度下降,原理如图4所示。当调谐过程为理想线性调频时,图中回波信号与参考光信号严格平行,拍频所得的差频信号将保持不变。然而,当扫频过程存在非线性效应时,差频信号随时间发生改变,最终导致差频信号展宽,降低系统距离分辨率。为了消除调谐过程中的非线性效应,一般需要对光信号频率进行实时校准。目前常用的校准方式主要有干涉仪和光频梳等。利用干涉仪进行校准时,一般采用干涉仪实时测量光信号的频率偏差,并在信号处理中将其去除。利用光频梳校准时,则将激光器波长锁定在光频梳的不同梳齿上,实现精准调谐。两种方式各有优势,前者结构简单,后者扫频快速精准。
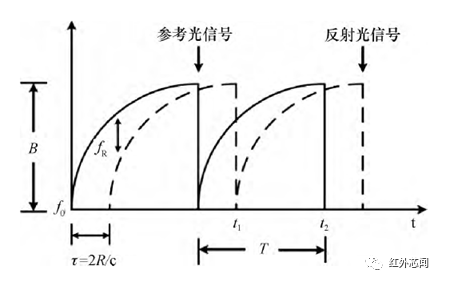
图4 非线性效应对调频连续波测距的影响
2.2 基于啁啾脉冲激光光源的调频连续波激光雷达
严格意义上,啁啾脉冲光源发射的并不是连续光,而是由脉冲序列组成的光信号。但是,啁啾脉冲激光可视为占空比较低的调频连续波光信号,在脉冲内,光场瞬时频率随时间线性变化,与调频连续波激光雷达的测量原理一致。因此,本文中将基于啁啾脉冲激光光源的调频连续波激光雷达作为调频连续波激光雷达中的一类。啁啾脉冲激光可通过多种方法产生,包括时域拉伸、傅里叶域锁模激光器,移频反馈激光器等。其中应用最广泛的是时域拉伸,基本原理如图5所示。
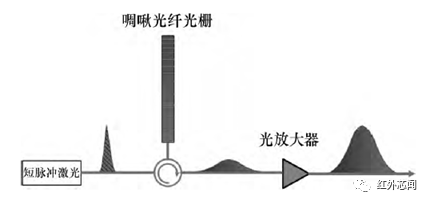
图5 时域拉伸原理示意图
时域拉伸需采用宽带激光光源,如飞秒激光器等。宽带激光光源的输出信号中包含了不同频率的光谱成分,在不存在啁啾的情况下,所有频率成分的光同时输出。引入通过色散元件后,不同频率成分的光场延时不同,导致激光信号在时域上发生展宽,即时域拉伸。当色散导致的延时与光场的频率成线性关系时,所产生的啁啾脉冲光信号就是线性调频信号。实际应用中,常见的色散元件有光纤、全息光栅、啁啾光纤光栅等。2010年,美国中佛罗里达大学的研究人员采用锁模激光器与啁啾光纤光栅级联,产生啁啾激光脉冲。利用该方法构建的调频连续波激光雷达距离分辨率可达亚毫米量级。2011年,他们在此基础上引入两个完全相反的啁啾光纤光栅,产生具有相反啁啾的脉冲光信号。利用该信号,研究人员在激光雷达中同时实现了测距和测速功能。2017年,上海交通大学的研究人员在飞秒激光与啁啾光纤光栅级联的基础上,采用另一束飞秒激光脉冲进行光学采样,验证了带宽高达700 GHz的啁啾光学信号,空间分辨率达到120mm。
基于傅里叶域锁模激光器构建的测距系统具有更新速率高、距离分辨率高等优点,目前主要应用于光学相干拓扑(OCT)成像领域,激光雷达领域的应用尚未见报道。在移频反馈激光器方面,日本东北大学的研究人员则开展了大量研究,实现了物体表面形貌扫描,距离精度可达130mm。傅里叶域锁模激光器和移频反馈激光器等方法所产生的啁啾激光具有较窄的瞬时带宽,通过精确控制反馈系统,可以同时实现较大的脉冲带宽和较低的瞬时带宽,有助于进行高分辨率高精度的激光测距。傅里叶域锁模激光器和移频反馈激光器虽然可以提供较窄的瞬时带宽.提高测量精度,但是引入的反馈控制系统相对复杂,需要精确控制系统参数,才可以稳定运行。
该类调频连续波激光雷达具有带宽较大,更新速率较高等优点。例如时域拉伸中,飞秒激光的带宽可达亚THz量级,大大提高了激光雷达的距离分辨率。同时,啁啾脉冲光源具有更高的重复频率,大幅提高了激光雷达更新速率。利用移频反馈激光器,德国的研究人员实现了测量精度um量级,更新速率MHz量级的激光测距雷达。而利用基于微谐振腔的光频梳,德国卡尔斯鲁厄理工学院的研究人员则实现了高达100MHz的刷新速率。利用该激光雷达系统,他们成功的对高速运动物体进行了实时测量。但是,该类激光雷达仍然存在线性度较差的问题。例如:时域拉伸方法中,色散器件难以实现较高的线性度。
2.3 基于外调制激光光源的调频连续波激光雷达
外调制激光光源一般由单频激光器和光调制器级联组成。激光信号光调制器完成调制过程,输出线性调频光学信号。常用的调制方式包括强度调制和频率调制等。强度调制方式采用线性调频信号对激光进行强度调制,并在接收端利用光电探测器将光强转换为电流,获得目标距离信息。频率调制方式则采用电信号调制激光频率。调制后,激光的瞬时频率产生偏移,偏移量由调制信号的瞬时频率决定。当调制信号为线性调频信号时,输出光信号即为线性调频信号。最后,在接收端利用相干探测获得拍频信号,提取目标距离和速度等信息。
外调制方式将调制过程转移到调制器中,降低了光源的复杂度。相较于内调制激光器,调制器的非线性效应极小,可以避免大带宽导致的非线性误差。采用窄线宽激光器作为光源,调制器输出的线性调频光信号可以同时具有较大的调制带宽和较小的瞬时线宽,有助于同时实现高分辨率和高精度测量。2009年,美国堪萨斯大学的研究人员利用强度调制器产生线性调频光信号,实现了调频连续波激光雷达。利用该激光雷达,研究人员对370m以外的建筑进行了成像。该方案中采用线性调频光学信号作为参考信号,与反射光信号进行相干拍频,降低了对光电探测器和射频接收端的带宽要求。2012年,该小组研究人员进一步利用光学单边带调制构建了一种调频连续波激光雷达,结构如图6所示。该方案无需声光移频器,即可实现外差探测。同时,利用电光调制器进一步增大了带宽,提高距离分辨率。2018年,天津大学的研究人员利用外调制和循环移频相相结合,实现了200GHz的调制带宽,调频速率高达3.6×1016 Hz/s。该方案不仅可以获得较大调制带宽,还可实现低至50kHz的瞬时线宽。近年来,随着微波光子技术的不断发展,利用微波光子倍频技术还可以进一步扩大信号带宽,提高调频连续波激光雷达的距离分辨率。
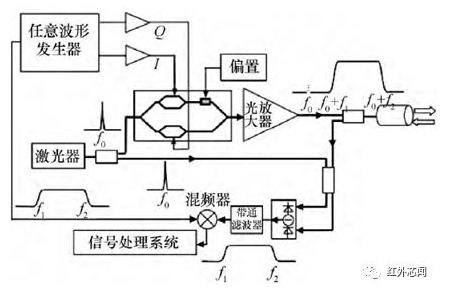
图6 一种基于外调制的调频连续波激光雷达示意图
相较于其他方案,基于外调制激光器的调频连续波激光雷达另一优点是可以利用丰富调制方式,获得复杂波形的光学信号。研究表明,利用复杂的波形有助于实现多功能激光雷达系统。因此,外调制激光器是构建多功能调频连续波激光雷达的优选方案之一。2012年,美国堪萨斯大学的研究人员利用光通信中的I/Q调制器,构建了一种正负边带复用的激光雷达。该系统利用线性调频负边带进行测距,利用单频正边带进行测速,从而在一个雷达系统中同时实现测距测速功能。2017年南京航空航天大学的研究人员利用双边带调制技术,同时产生正负啁啾的光学信号,实现了对目标的同时测速测距。201 9年,他们还采用偏振复用双平行马赫曾德尔调制器,构建了一种多功能调频连续波激光雷达,该雷达可以同时测量待测目标的距离、速度和偏振特性。
此外,外调制技术采用线性调频信号作为调制信号,其产生方式更为成熟。而且,采用微波信号作为调制信号,提高了激光雷达与微波雷达的技术兼容性,有利于构建多传感器融合的探测系统。
3 调频连续波激光雷达的前沿应用
3.1 高精度三维成像
激光雷达是一种理想的非接触三维成像手段,其利用激光束作为探测信号,具有较高的空间分辨率。常见的激光雷达中,脉冲激光雷达系统简单,成像速度快,但是距离分辨率较低,难以实现高精度三维成像。同时,脉冲激光雷达采用直接探测方式,无法进行多普勒测量、容易受背景噪声影响。调频连续波激光雷达则可以获得比脉冲激光雷达更高的距离分辨率,有助于实现高精度的三维成像。同时,调频连续波激光雷达一般采用相干探测,可以对运动目标进行多普勒测量。因此,调频连续波激光雷达是一种更具应用前景的高精度三维成像方法。
2017年美国陆军地理空间实验室的研究人员对比了脉冲激光雷达和调频连续波激光雷达的三维成像效果,结果如图7所示。其中图(a)为脉冲激光雷达的成像结果,图(b)为调频连续波激光雷达的成像结果。对比发现,调频连续波激光雷达可以观察到更多的局部细节,实现更高精度的三维成像。同时,由于采用了相干探测方式,调频连续波激光还可以实现对运动目标的多普勒成像。通过对运动物体进行多普勒成像,激光雷达可以区分出运动物体与静止物体,结果如图(c)所示。该特点在自动驾驶领域中具有重要的应用价值。通过对运动物体进行速度测量,有助于自动驾驶系统进行预判,提高驾驶安全性。
得益于相干探测技术,调频连续波激光雷达还可以获得更高的信噪比。尤其是在背景噪声较大的环境下,相干探测技术可以大幅消除外界辐射噪声的影响。2018年,美国国家标准局的研究人员利用调频连续波激光雷达,透过火焰对物体的受热形变进行了测量。火焰所产生的辐射光峰值一般处于1560nm,会对激光雷达产生显著的影响。然而,利用相干探测,调频连续波激光雷达在火焰存在情况下仍然可以正常工作。在距离2m的情况下,测量精度可达30um。实验结果验证了调频连续波激光雷达可以对物体在火焰中的运动和形变进行观测。进一步地,将调频连续波激光雷达与压缩感知等技术相结合,还可以降低激光器噪声和线宽不确定性对成像结果的影响。
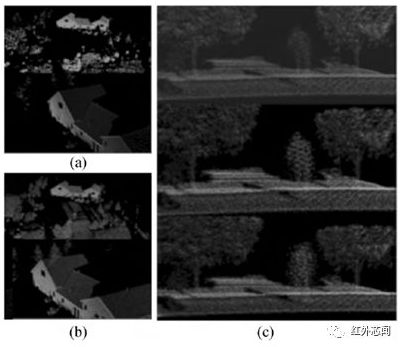
图7 调频连续波激光雷达高精度三维成像
3.2 合成孔径激光雷达成像
合成孔径雷达是利用与目标相对运动的小孔径天线获得高分辨率的一种成像雷达。合成孔径激光雷达采用激光作为探测信号,可以产生比微波信号更高的多普勒频移。因此,利用合成孔径原理,可以获得更高方向分辨率。调频连续波激光雷达可以同时获得待测目标的距离和速度信息,可以用来构建合成孔径激光雷达。
早在20世纪60年代,国外就已经开展了合成孔径激光雷达的初步探索。2002年,美国海军实验室研究人员Bashkansky等采用波长为1550nm的单模可调谐激光器,首次实现了对运动目标的二维成像,分辨率优于100um。2012年,美国蒙大拿州立大学Stephen等采用波长为1550nm的超宽带线性调频激光光源演示了聚束SAI成像。结果显示该系统可以更好的显示干蜻蜓翅膀的精细结构。国内在合成孔径激光雷达领域的研究尚处于起步阶段。2014年,中科院电子所研究人员利用1550nm的啁啾激光构建合成孔径激光雷达,成功地对2.4m以外的物体进行了二维成像。2017年,上海交通大学的研究人员,利用外调制技术产生线性调频激光信号,并应用于合成孔径激光雷达。利用该雷达对1km以外的物体进行成像,图像分辨率可达4 cm。2018年,中科院电子所N.Wang在合成孔径技术基础上,进行了逆合成孔径激光雷达成像实验。实验中利用I/Q调制器产生线性调频光信号,对航模进行高分辨率逆合成孔径成像,结果如图8所示。图像径向分辨率为2.5cm,角向分辨率为1.4cm。进一步地,D.Mo通过数值计算分析了调频连续波激光雷达对旋转物体进行逆合成孔径成像性能指标。目前,基于调频连续波激光雷达的合成孔径成像研究仍处于实验验证阶段,后续需进行外场试验,验证实际性能。
3.3 片上集成调频连续波激光雷达
随着自动驾驶等技术的不断发展,紧凑型激光雷达受到了越来越多的关注。利用集成光子技术构建片上集成激光雷达是未来发展的重要趋势。脉冲激光雷达的峰值功率较高,对集成器件的承载能力提出了较高的要求。所采用的直接探测技术,需要片上集成探测器具有较高的灵敏度。调频连续波激光雷达则采用连续光作为探测信号,峰值功率较低。由于采用相干探测技术,调频连续波激光雷达系统对探测器性能的要求也相对较低。因此,调频连续波激光雷达被认为是片上激光雷达的优选方案之一。
2014年,加州大学伯克利的研究人员利用CMOS集成电子技术,研发出了一种调频连续波激光芯片,解决了片上调频连续波激光雷达的光源问题。2016年,他们在此基础上利用片上集成的调频连续波激光雷达对目标进行了探测,探测距离可达14m。在50mm距离处,分辨率可达8um。然而该研究仅能实现点测量,无法对目标进行成像。为解决这一问题。2015年,美国加州理工大学的研究人员研发了一种集成光子相干成像器,其测距原理与调频连续波激光雷达相同。系统中采用了相干像素阵列,最终实现了对距离50cm处静止物体的成像。进一步地,2017年麻省理工学院的研究人员将光学相控阵引入激光雷达系统。他们利用一组级联的相移结构,构建光学相控阵,进行光束控制,实现了对目标的扫描成像。
2018年,法国Thales公司展示了一种集成度更高的片上调频连续波激光雷达。该雷达中,波形校准、光束扫描以及平衡探测均集成在一个芯片上,大小仅为9mm2,结构如图9(a)所示。系统中,引入延时线对光波波形进行校准,并利用光学相控阵实现光束扫描。利用该激光雷达,研究人员获得了9.5m远处的墙体的实际形貌,如图9(b)所示。值得一提的是,实验中激光雷达输出功率仅
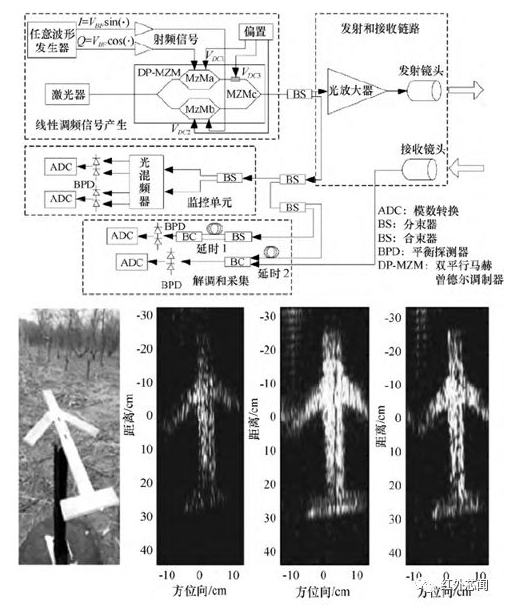
图8 基于调频连续波激光雷达的合成孔径成像
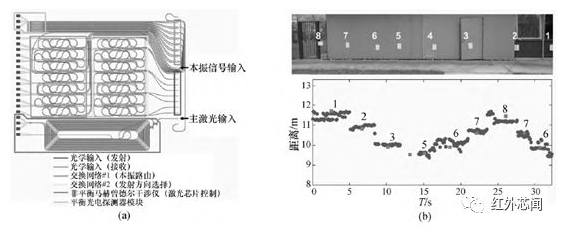
图9 片上集成调频连续波激光雷达及其测量结果
为5mW。该实验为片上集成全固态光学相控阵激光雷达奠定了基础,有望大幅降低自动驾驶激光雷达成本。
4 总结
调频连续波激光雷达具有广阔的应用前景。相较于传统脉冲激光雷达,调频连续波激光雷达具有分辨率高、测量距离远、可实现多普勒测速、便于片上集成等优势。虽然调频连续波激光雷达仍然存在测量时间长,数据处理量较大等缺点,但是在遥感测绘、高精度三维成像、自动驾驶等领域已经展现出应用价值。针对目前的发展现状,未来调频连续波激光雷达的发展方向将有以下三方面:
(1)提高分辨率和准确度。调频连续波激光雷达的分辨率由光学信号的带宽决定,准确度受到光信号的瞬时线宽和信噪比影响。因此,为了获得较高的分辨率需要提高系统带宽。提高准确度则需要光信号具有较窄的瞬时带宽和较高的信噪比。利用光学频梳实现调频连续波激光雷达将是一种有效的解决方案。
(2)实现多功能激光雷达。调频连续波激光雷达可采用丰富多样的信号波形,根据不同需求设计波形,可以在同一激光雷达系统中实现多种功能。当前,微波光子技术与光通信技术领域中存在丰富的调制方式,可产生不同的信号波形。借鉴这些技术,有助于实现多功能激光雷达。
(3)片上集成激光雷达。片上集成是激光雷达发展的必然趋势。调频连续波激光雷达峰值功率较低,有利于进行片上集成。利用异质集成技术,将激光器、探测器、光学相控阵等关键系统集成于同一芯片上将大幅降低系统体积和成本,有望将高精度三维成像功能引入消费电子领域。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读





















 关注我们
关注我们

