






应用背景

(一)检测需求
样品图 视觉定位激光打标加工工序示例图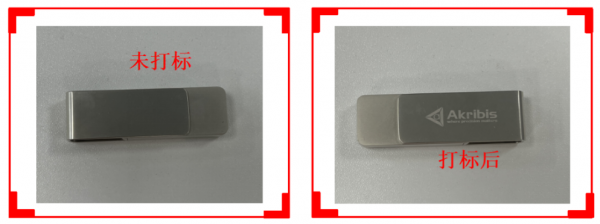
先使用学习模板创建U盘的形状模板,接着将形状模板位置结果作为基准位置。然后进行九点标定,将我们的像素坐标转换成世界坐标系。最后将标定后匹配定位出来的U盘的位置信息显示出来,并统计当天上料次数。
(三)课前准备
1.打开ZDevelop软件:打开ZDevelop软件:新建名称为“U盘定位打标.zpj”项目→新建HMI文件→新建main.bas文件(用于编写界面响应函数)→新建“global_variable.bas”文件(用于存放全局变量并开启HMI自动运行任务)→新建“InitLocator.bas”文件(用于初始化参数)→新建“draw.bas”文件(用于更新绘制ROI数据)→新建“camera.bas”文件(用于实现相机采集功能)→文件添加到项目。
2.设计HMI主界面。
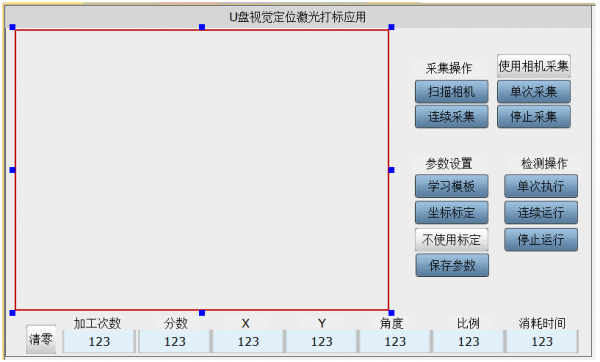
3.关联HMI主界面控件变量。
(2)不使用标定:TABLE(32)
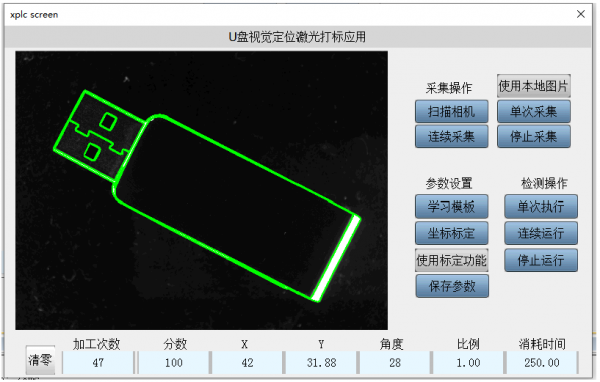
(3)分数:d_match_rst(0)
(4)X:d_match_rst(1)
(5)Y:d_match_rst(2)
(6)角度:d_match_rst(3)
(7)比例:d_match_rst(4)
(8)消耗时间:d_match_time
4.本期课程代码主要实现的功能使用到的指令如下。

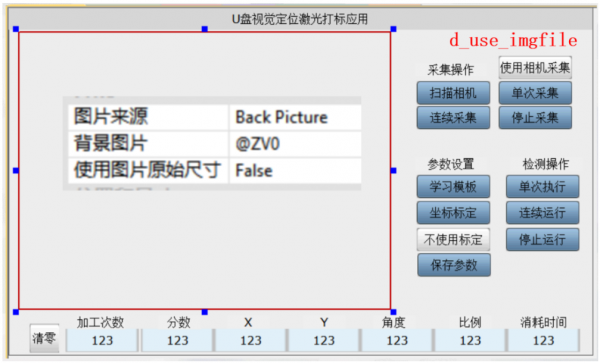
查看运行效果:将项目下载到控制器中→点击使用本地图片→单次采集→点击个学习模板(用于创建基准模板)→点击坐标标定(用于像素坐标转换成世界坐标系)→点击单次运行(查看检测结果)→点击使用标定功能(把当前样品像素坐标转化为世界坐标的位置信息)→点击连续运行(查看连续运行效果)→结束。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

