






据悉,中国香港城市大学、日本千叶工业大学研究人员对高角度分辨率360°激光雷达的最新研究发表在《Scientific Reports》上。
光探测和测距(雷达)已应用于许多领域,如机器人导航、自动驾驶汽车、无人驾驶飞机、土地测量等。多通道激光雷达系统具有较大的视场(FoV),在自动驾驶领域具有重要意义。然而,收发器的数量限制了多通道激光雷达系统的垂直角度分辨率,并使其成本高昂(成本高达7.5万美元,是自动驾驶汽车中最昂贵的组件)。另一方面,微机电系统(MEMS)反射镜的出现可能为低成本、高角度分辨率的激光雷达系统提供一种非常有前景的解决方案。本文展示了一种基于MEMS反射镜的高角度分辨率360°激光雷达系统。采用MEMS反射镜与激光雷达旋转平台相结合,实现了360°× 8.6°(水平×垂直)视场。与现有的商用多通道360°激光雷达系统相比,该系统的角度分辨率是Velodyne HDL-64激光雷达传感器的13.8倍。
本文报道的二维MEMS反射镜最大可达90°,反射面为64 mm2。为了提高分辨率,设计减小了反射镜面积,使反射镜频率达到0.4 kHz × 21.3 kHz(水平×垂直)。为了实现二维扫描,将一维MEMS反射镜与旋转平台相结合。旋转平台是一种独立于MEMS反射镜的成熟且易于控制的装置。此外,旋转平台可以实现激光雷达系统的360°水平扫描。因此,与使用二维MEMS反射镜设计的激光雷达系统相比(后者需要更复杂的系统架构和光学组件),旋转平台可以显著降低整体系统复杂性,同时提供360°视场。
在研究中,MEMS反射镜放置在研究人员自行设计的单收发模块中,与360°旋转平台集成,实现全景扫描。与多通道激光雷达系统相比,本系统不受激光源和接收器数量的限制,能够实现0.07°× 0.027°(水平×垂直)的角度分辨率和360°× 8.6°(水平×垂直)的视场。通过这种配置,360°视场激光雷达系统可以以合理的价格(1700美元)实现。研究人员还开发了一个数据处理程序,将扫描数据转换为三维点云图,生成的图像验证了基于MEMS镜像的激光雷达系统的完整功能。
设计及原理

图1:基于MEMS反射镜的360°激光雷达系统(a)激光雷达系统示意图。(b)激光雷达的研究场景和规格。
基于MEMS反射镜的360°激光雷达系统
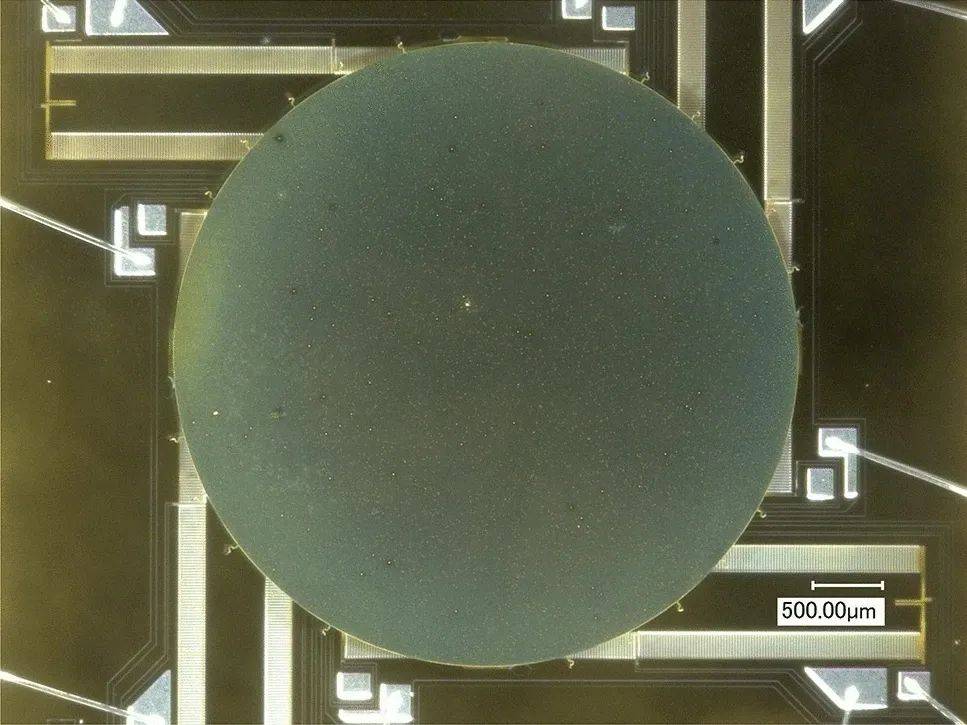
图2:MEMS反射镜结构。
发射器和接收器模块
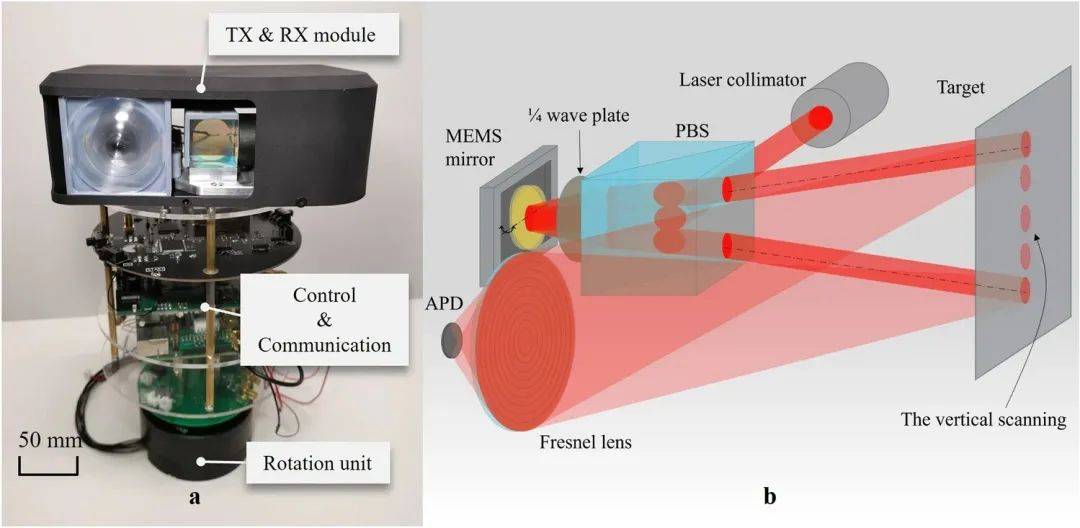
图3:激光雷达系统布局。(a) 360°激光雷达系统双轴结构。(b) TX和RX模块示意图。
系统控制与通信

图4:激光雷达系统原理图。
实验
测量是在室内进行的,在360°激光雷达系统周围放置了两个物体(图5a)。环境光的主要来源是荧光灯。因此,在APD前面应用了一个滤光片,只允许905 nm波长的光通过。在激光雷达系统周围2 m处放置两个不同材质和几何形状的多平面目标。360°雷达系统标定后得到的点云正面视图如图5b所示,可以看到两个物体形成的表面。角分辨率达到0.07°× 0.027°(水平×垂直)。图5c和图d是点云提取的深度图,其中不同颜色表示点到原中心的距离。
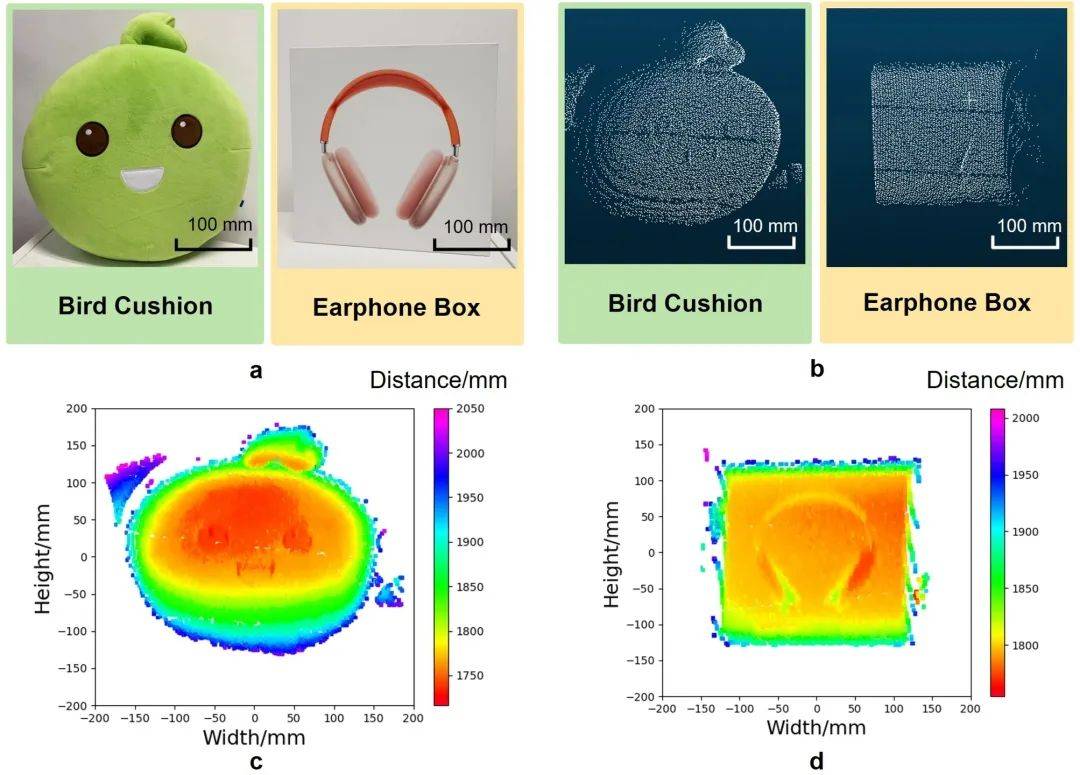
图5:扫描结果。(a)被扫描物体的照片。(b)扫描后的点云图。(c)靠垫深度图。(d)耳机盒深度图。
在更大的空间内进行扫描实验,进一步验证了360°扫描性能。实验流程如下:首先,激光雷达系统在完成360°扫描过程后位于P1(图6a),移动到下一个点P2进行同样的扫描过程,并在P3和P4进行同样的扫描过程。
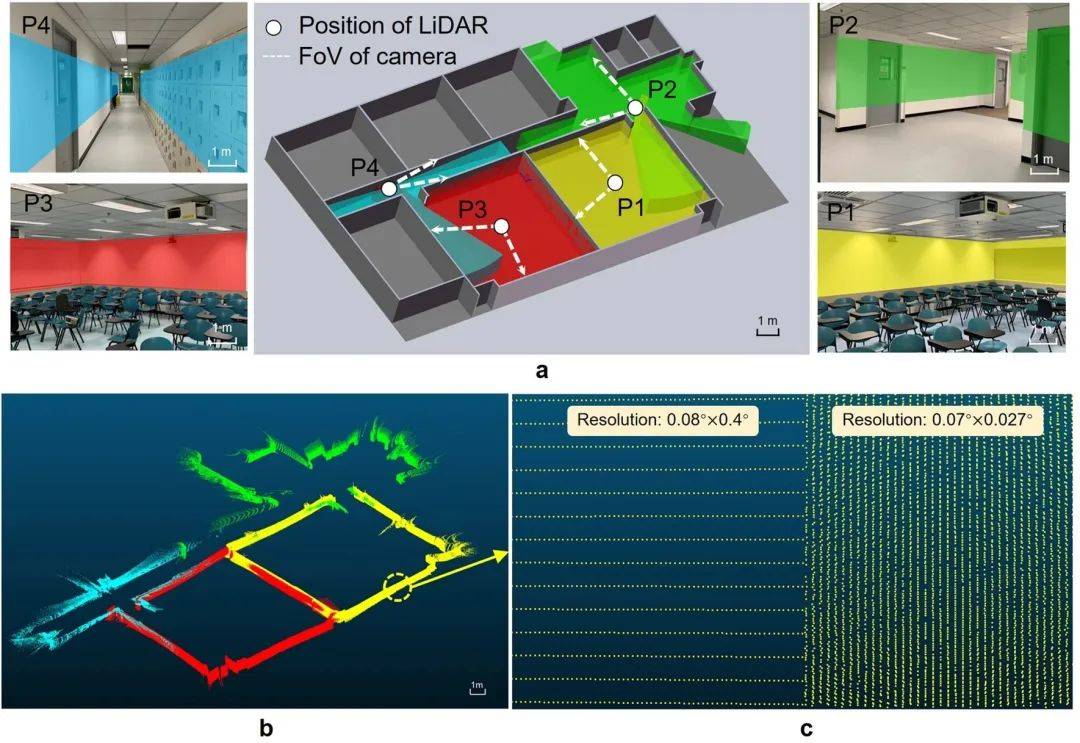
图6:空间扫描结果。(a)房间及走廊的三维结构。(b)合并点云的等距视图。(c)扫描结果比较。左为Velodyne HDL-64仿真结果; 目前的研究结果更密集,角分辨率更高,可以在相同的壁面积和距离下显示更多的细节。
结论
在本研究中,展示了一种基于MEMS反射镜的具有高垂直扫描分辨率的360°激光雷达系统。实验结果表明,该系统具有较好的视场(水平方向360°,垂直方向8.6°)和角分辨率(水平方向0.07°,垂直方向0.027°)。该功能可进一步实现高质量的全景扫描,为自动驾驶、机器人导航、室内测量等提供经济实惠的解决方案。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

