






近日,西安电子科技大学项水英教授团队在郝跃院士的悉心指导下,在光神经形态计算研究方向取得重要进展。在国际光学顶级期刊Laser &Photonics Reviews(中国科学院1区TOP期刊,IF:11.0)上发表了题为“Hardware Implementation of Ultra-fast Obstacle Avoidance based on a Single Photonic Spiking Neuron”(基于单个光子脉冲神经元的超快避障硬件实现)的最新研究成果。
类脑计算借鉴了大脑神经系统结构和信息处理机制处理信息。人类的大脑是目前自然界中唯一真正的通用智能系统,能够以极低的能量消耗来处理不同的认知功能。学习大脑的信息处理机制显然是构建更强大、更通用的机器智能的一条有前途的道路。而传统的电子技术仍然受到速度、带宽、效率的限制,光子神经形态计算有着超高速、大带宽、低功耗等显著优势,是一个有力的替代方案。
大多数自主机器人导航和避障系统都依赖激光成像探测、雷达、高精度GPS等传感器来感知与障碍物之间的距离。这些传感器具有功耗大、成本高、难以收集相关目标数据的特点。而且一些小型无人机的有效载荷有限,迫切需要更简单的系统架构、低功耗、优化的处理和实时的性能。针对以上的问题,团队提出了基于单个光子脉冲神经元的模拟视觉神经系统的超快视觉避障方法并进行实验性验证,整个系统由单个相机,Fabry–Pérot激光器,运动神经元组成,分别模拟人眼的感光细胞,视网膜神经元,大脑。该系统在没有任何事先训练的情况下感知信息。它不限于特定场景,也不需要额外的传感器输入。可以降低计算和硬件成本。单个Fabry–Pérot激光器神经元可以实时将外部光学注入编码为具有不同速率的超快尖峰事件。尖峰速率值被用于生成必要的控制命令以实现安全的避障。激光器的处理速率可以达到5GHz。这项研究为载荷有限的小型设备做出超快的避障响应提供一个可行的方案,并证明了在多种不同的运动场景下解决避障问题的能力,为未来应对复杂的避障场景奠定了基础。
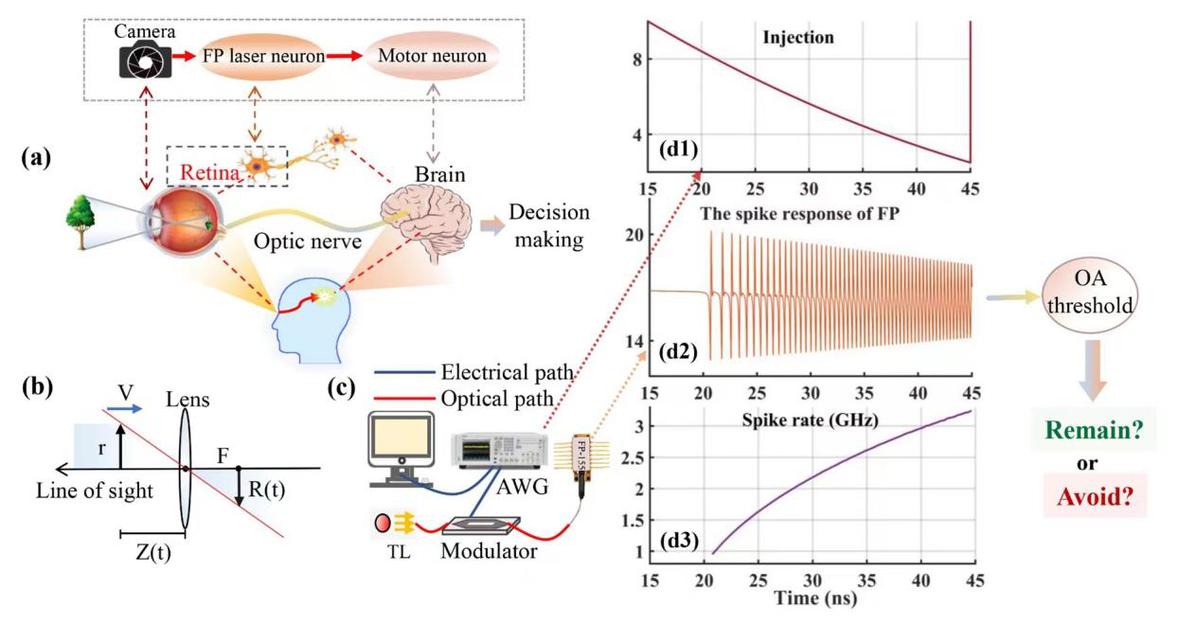
基于单个光子脉冲神经元的超快视觉避障系统结构
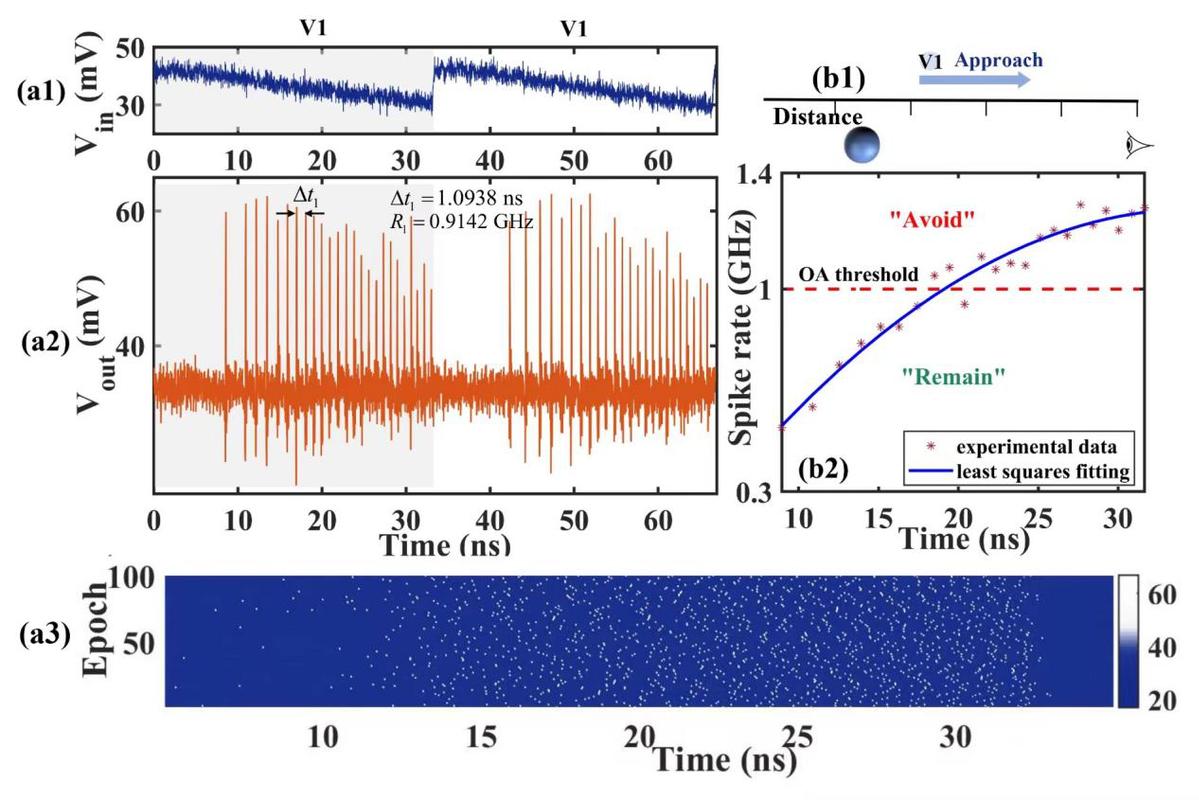
面对以恒定速度接近的障碍物激光器的响应结果
本文报道的基于光子脉冲神经元的视觉避障方法,具有体积小,重量轻,低成本,低功耗,实时的性能,超快的处理速度,适用于多种避障应用。为未来光子神经形态超快避障的应用奠定了基础,在自动驾驶,无人机导航,机器人等领域的应用前景十分广阔。
中国日报陕西记者站 秦峰
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

