




施迈特步进驱动器的电流:
电流是判断驱动器能力的大小,是选择驱动器的重要指标之一,通常驱动器的最大电流要略大于电机标称电流,通常驱动器有2A、4A、5A、7A、10A等规格。
施迈特步进驱动器供电电压:
供电电压是判断驱动器升速能力的标志,常规电压供给有:24VDC、40VDC、50VDC、80VDC、110VA、220VAC等。
施迈特步进驱动器的细分:
细分是控制精度的标志,通过增大细分能改善精度。细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
控制信号接口说明:
1、差分式接口:
施迈特电气(SHIMET)步进驱动器采用差分式接口电路,内置高速光电耦合器 ,允许接收长线驱动器,集电极开路和PNP输出电路的信号,可适配各种控制器接口,抗干扰能力强。
2、单/双脉冲模式:
施迈特(SHIMET)根据客户需要生产出数款驱动器可以接收两类脉冲信号:一种为脉冲+方向形式(单脉冲);一种为正脉冲+反脉冲(双脉冲)形式。可通过驱动器内部的跳线器进行选择。

步进驱动器工作模式 :
有三种基本的步进电机驱动模式:整步、半步、细分。其主要区别在于电机线圈电流的控制精度(即激磁方式)。
1、整步驱动:
在整步运行中,同一种步进电机既可配整/半步驱动器也可配细分驱动器,但运行效果不同。步进驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度 (标准两相电机的一圈共有200个步距角)。
2、半步驱动:
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。所有雷赛公司的整/半步驱动器都可以执行整步和半步驱动,由驱动器拨码开关的拨位进行选择。和整步方式相比,半步方式具有精度高一倍和低速运行时振动较小的优点,所以实际使用整/半步驱动器时一般选用半步模式。
3、细分驱动:
细分驱动模式具有低速振动极小和定位精度高两大优点。对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于0.90度的步进应用中,细分驱动器获得广泛应用。其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。如上图所示。例如十六细分的驱动方式可使每圈200标准步的步进电机达到每圈200*16=3200步的运行精度(即0.1125°)。雷赛公司可提供规格齐全、性能优越、品质可靠、价格优惠的十余款细分驱动器。

1. 负载分类:
(1)Tf力矩负载:
Tf = G·r
G 重物重量 r 半径
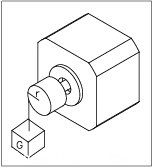
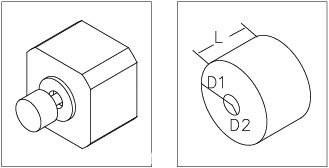
(2)TJ惯性负载:
J = M(R12+R22)/ 32 (Kg·cm)
M:质量
R1:外径
R2:内径
TJ = J·dw/dt dw/dt 为角加速度
2、力矩曲线图的说明
力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。

说明: 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。 (1)直线加速运动 已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和 加速脉频率F(t) 已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和 加速脉频率F(t)
(1). 工作频率点: 表示步进电机在该点的转速值。单位:Hz
n=Θ*Hz / (360*D)
n 转/秒
Hz 该点的频率值
D 电路的细分值,
Θ 步进电机的步距角
例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒
(2). 起动区域: 步进电机可以直接起动或停止的区域。
(3). 运行区域: 在这个区域里,电机不能直接运行,必须先要在起动区域 内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
(4). 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
(5). 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
(6). 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
(7). 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 、加速和减速运动的控制
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。 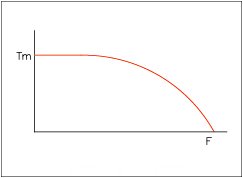

A.确定TJ,一般TJ =70% Tm。
B.tr = 1.8*10-5*J*Θ*(F1-F0)/ (TJ-TL)
C.F(t)=(F1-F0)*t/tr+F0 , 0 < t < tr 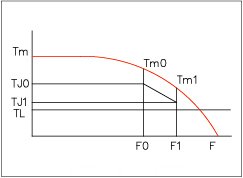
A.确定TJ0,TJ1一般TJ0 =70% Tm0,TJ1 =70% Tm1,TL=60%Tm1
B.tr = F4*ln[(TJ0-TL)/(TJ1-TL)]
C.F(t)=F2*[1-e^(-t/F4)]+F0 , 0 < t < tr
其中,F2=(TL-TJ0)*(F1-F0)/(TJ1-TJ0)
F4=1.8*10-5*J*Θ*F2 /( TJ0-TL)
J 为电机转子和负载的转动惯量,Θ为每一步的度数,整步运行时为电机步距角。
至于减速的控制,只要将上诉的加速脉频率反过来进行即可。
4 、振动和噪音
一般来说,步进电机在空载运行时,在200pps左右会有一个很严重的振动,甚至会产生失步的现象,这是由于电机转子是一个有质量的物体,当电机运行的频率接近到转子的固有频率,振动就产生了,一般有几种解决的办法:
(1). 避开振动区,使电机的工作频率不在这个范围内。 #p#分页标题#e#
(2). 采用细分的驱动方式,使原来1步完成的动作分几步完成,减少振动,一般半步运动时,电机的力矩比整步时少15%,采用正弦波电流控制时,力矩减小为30%。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

