






对于机械补偿式连续变焦系统,总有一个变焦组分和一个补偿组分分别以不同规律运动以保证在改变组分间隔达到连续变焦的同时自动补偿像面位移误差。这两个组分的运动规律通常要求变焦组以线性规律移动,而补偿组则以非线性规律运动。两组镜头的运动多是以机械凸轮机构驱动实现的。驱动凸轮曲线的斜率(陡度)直接影响着运动的平滑度,陡度超过一定程度时会使机构运动“卡死”。凸轮曲线的陡度一方面和曲线套筒的直径以及曲线套筒的转动总角度有关,另一方面还和曲线的方程以及移动组总移动量有关。曲线套筒的直径受镜筒外圆直径约束,曲线套筒的总转动角度也有一定限制。因此,曲线的陡度归根结底是和曲线方程以及移动组总移动量有着密切关系,特别对于变焦倍率(变焦比)的系统因曲线陡度过大而使运动卡死是经常面临的困难。OCAD具有对凸轮曲线优化设计的功能,把一个线性运动和一个非线性运动变成两个非线性运动的结构形式,这样可以在不改变变焦组和补偿组相对移动关系的前提下调整补偿组运动曲线降低曲线陡度,改善使用效果。在图4中是一个20倍连续变焦系统的凸轮曲线在高倍阶段斜率达到75°之高已造成运动卡死如图1所示。经OCAD对凸轮曲线进行优化后可以明显改善曲线斜率,斜率最大值不超过30°,如图2所示。明显改善了凸轮曲线性能。经优化的凸轮曲线坐标数据列于图3,便于直接提供数控机床加工,坐标点数可以根据需要选择。显示数据还可以直接转换成word格式文件或excel工作表格式如图4所示。
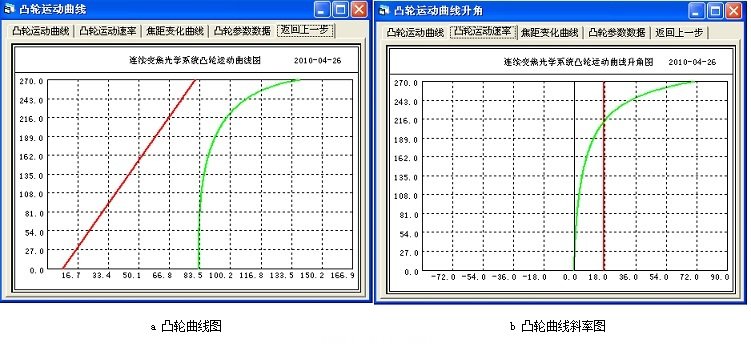
图1 优化前凸轮曲线斜率对照

图3 凸轮曲线坐标数据
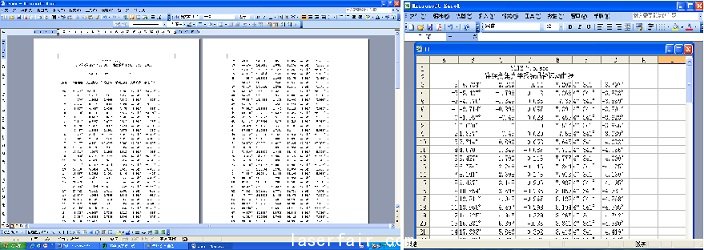
图4 凸轮曲线坐标数据的多种数据格式文件
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

