




由于零部件供应厂商和制造企业面临着日益变化的各种要求,因此,灵活加工便是实现生产设备高利用率的主要前提条件。灵活生产流程的一个要点是采用机器人辅助的测量站来取代专门的测量及检验装置,因为这些测量及检验装置在遇到哪怕是很小的工艺变更时,也会产生很高的换装费用。
采用标准元件,创造高价值
采用OPW-R1机器人辅助测量站,用户可以使其各测量装置很好地与生产任务相匹配,并使其适应于各种加工场合。

辅助作业流程会影响到灵活加工的效果。如果不想让测量系统变成阻碍生产效率的因素,那就必须要使测量系统满足持续变化的加工要求。采用机器人辅助的测量系统即可达到这些要求。
通过结合使用工业机器人和测量站进行测量,可以产生高度灵活性的设备单元,从而在满足测量数据多样性的同时,达到费用低和测量精确的目的(图1)。由于标准部件可以重复使用,因此设备的利用价值高,测量任务也不再受设备型号更换和产品更新换代的制约。

图1 机器人辅助的测量站是定向的测量与检验装置的替代产品,这是因为检验流程的变动变得简单易行
去年OPW首次在斯图加特Control展会上展出的OPW-R1型机器人测量站是一种由机器人、工作站控制系统、测量计算机和与测量任务相匹配的传感元件所构成的一种高效测量系统。根据不同的测量任务要求,机器人测量站则由不同的测量点和测量器械组成。所采用的均为标准化的零部件——从标准型工业机器人、标准测量探头,一直到标准摄像系统。
可以使用光学、触觉和气动传感器
可以使用光学、触觉和气动测量传感器,利用其各自的长处。测量系统尤其以其良好的三维灵活性(部件多样性、检验灵敏性和检验范围广)而见长并可涵盖刚性多点位测量装置与灵活性坐标测量仪之间的所有要求。与各项测量任务的匹配则通过软件系统控制进行。测量数值被静态或扫描动态捕获,评估则通过2D和3D进行。
采用机器人可以完成一些特定的测量任务
测量系统的核心部分是工业机器人。但机器人并非单纯只是一种操作系统,同时它也与测量计算机进行通信联络,因此可以完成一些特定的测量任务。机器人移动测量工件或测量器械。检测方法和检测范围依据不同的工件类型相互协调。在工件品种繁多的情况下,则使用换件抓爪。通过单接触技术方案,OPW-R1型机器人测量站已成为一种可快速作业的测量工作站。测量时间取决于测量范围。当测量范围增大时,可以加入暂停、工具更换时间或中断等工序。
例如针对OPW-R1型机器人测量站的建设:
导入:OPW-R1型机器人测量站通过一种输送带,既可以把测量器械引向工件,也可以把工件引向测量器械(图2)。其独特的地方是机器人可以像手一样触及工件并把工件的位置编入到计算过程中去。

图2 在采用测量系统时,要么是测量装置被引向工件,要么是工件被引向测量装置
部件识别:例如摄像系统可以识别部件并选择出相应的测量程序。
气动测量检测法:气动测量方法以精度高和稳定时间长而见长。它对环境影响不敏感,因此可以确保测量的精度和测量结果的可重复性。采用空气的无接触式测量可以避免对工件的损伤。
光测量检测法:在实际工作中,传统的测量技术在特殊的要求场合总会遇到其使用极限 , 例如极端的环境负荷、很小的安装空间、较低的质量和较大的测量范围以及较长的传输距离等。光学测量可以实现对物流和固体物表面的无接触、快捷和精确的测量。
检测方法:所有探测均采用测量探头进行,测量探头可以与各种不同直径的探针相配套使用。数字式气动可调节探头显得非常新颖。
测量计算机:工业用途的测量计算机则以数据采集开放透明、应用灵活性强、操作简便和配置优良等特征见长。这种测量计算机拥有为数众多的各种不同的接口。其软件基础为已经经过400多例实际应用证实性能良好的OPW-QP测量软件。
机器人测量站承担测量过程自动化的任务
只有在没有操作人员可供使用和部件呈现多样性的情况下,采用OPW-R1型机器人测量站才有意义。此时,测量过程为全自动进行,测量误差小,所需测量时间短,而且产品品种通常较多,所要求的检测任务各不相同(例如增加标识或托盘)和检测特征及检测范围各异。
这里以实际例子加以说明:一家汽车零部件供应厂商有意采用测量装置,以便对两种不同类型的离合器外壳和减速箱外壳进行自动检测。测量装置拥有自己的控制系统,它在装配、密封性检验之前和清洗之后被链接到机器人装料的生产线上。鉴于工件加工公差范围较小、工件规格繁多和工件表面不得有刮痕等特点,厂家决定采用一种带有气动测量探头的测量技术方案。
测量装置由两个分别针对离合器外壳和减速箱外壳的分离式测量站构成,工件相互分开,由一台操作机器人以±0.5mm的定位精度进行装载和卸载。在工件进入到测量站之后,工件向下沉。首先,所有检索测量探针被引向工件位置,在此位置上校准气缸逐个抬起并作水平调节,工件在被卡紧状态下接受测量。两种装置可以回转180°,以使测量机器人达到最佳的接触位置。
在接收到工件之后,拥有众多变换测量探针和校准单元的两台测量机器人对孔进行测量。在一个测量循环之内(不计装载和卸载为110s),测量探针最多要更换七次,更换一组探针所需的时间大约为6s(图3)。每种工件要经历两个测量流程(即一个瞬时版和一个详尽版),以便在两个方向上对孔进行扫描式检测。在瞬时版的流程中只对最后加工工序上的孔进行检测。依据测量探针的不同造型,执行一个或两个测量循环。由于工件外形各异,孔的位置各不相同,因此采用固定式测量探针对不易触及或妨碍测量作业的各孔进行检测。
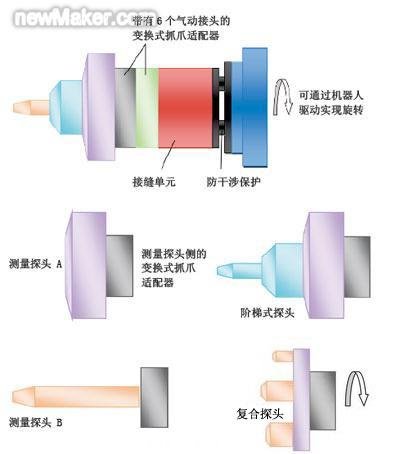
图3 在测量离合器外壳和减速箱外壳时,两台测量机器人对孔进行测量。测量机器人拥有许多变换式测量探头和校准单元。在一个测量循环中,测量探头最多需要更换七次
测量器械可进行50次
重复性测量
针对减速箱外壳的有:
30个检测位;
3个带有测量值同步接收接口的分级和多重测量探针;
10个静态探针;
8个变换型探针;
16个机器人测量值接收点。
针对离合器外壳则有:
28个检测位;
6个带有测量值同步接收接口的分级和多重测量探针;
6个静态探针;
8个变换型探针;
16个机器人测量值接收点。
对测量器械(V1)的能力,可在设备的调节器具上执行50个重复测量,并通过QS标准评价加以证明(cg/cgk≥1.33)。而对测量器械(V3)的能力,则通过在10个合格工件上各做两次重复测量加以证实。最后,得出R&R特征值(≤20%)。 #p#分页标题#e#
测量系统很容易实现换装和扩展
这种技术方案的优点在于,通过采用校准环达到简便的操作,同时由于使用分级和多重探针(更换时间短)而实现极短的测量循环时间。此外,还可以实现对孔的动态测量(通过180 °扫描),犹如探针位置(深度和测量点位)均可以实现编程。在投资保护方面,这种技术途径也具有很大优势,这是因为测量系统可以很容易实现换装和扩展,从而在测量器械的更换上达到很高的灵活性。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

