



1 引言
本文针对PID控制的特点,设计了一种积分分离的控制方法,即当系统误差较大时,取消积分环节,避免由于积分累积引起系统较大的超调;当系统误差较小时,引入积分环节,以消除误差,提高控制精度。将这种积分分离PID控制应用于交流伺服系统的位置实时控制,从而使控制过程的静态、动态性能指标较为理想。
2 系统结构设计
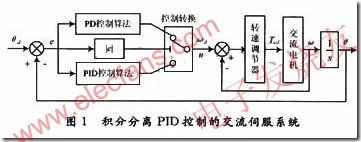
积分分离PID控制交流伺服系统结构如图1所示。图中θd为给定角位移,θ为电机转轴的实际角位移,e为θd和θ进行比较而得到的偏差,则有:
图1中,u为PID控制的转速期望值;ωd为期望电机转速;ω为实际电机转速;ωd与ω的偏差经过转速调节器产生期望的电机电磁转矩Td由于内环的不足可由外环控制来弥补,所以转速调节器采用一般的PI调节器即可,而电机的电磁转矩控制则采用直接转矩控制方法。
3 积分分离PID控制器
PID控制是一种技术成熟、应用广泛的控制方法,其结构简单,而且对大多数过程均有较好的控制效果。其离散PID控制规律为:
式中,u(k)为k时刻控制器的输出量;KP,KI,KD分别为比例系数,积分系数和微分系数;e(K)为当前时刻的交流伺服系统的位置与期望值之差;e(k-1)为上次采样时刻的交流伺服系统的位置与期望值之差。
由式(2)可得到控制器输出第k个周期时刻的控制量u(k)和第k-1个周期时刻的控制量u(k-1)之间的增量为:

在PID控制中,积分环节的作用是消除静态误差,提高系统的控制精度。如果在误差较大的初始阶段引入积分环节,会造成:PID的积分累积,从而引起系统较大的超调。因此,本文针对PID控制的特点,设计了一种积分分离的控制方法,积分分离PID控制算法的程序框图如图2所示。
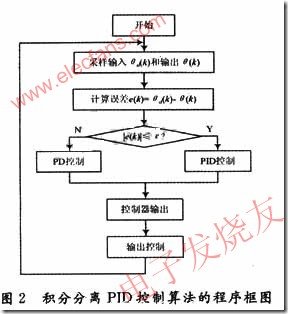
当系统误差较大时,取消积分环节,采用PD控制,避免由于积分累积引起系统较大的超调;当系统误差较小时,引入积分环节,采用PID控制,以消除误差,提高控制精度。即:
式中,ε>0为人为设定的阈值。
积分分离控制算法可表示为:

式中,T为采样时间,a为积分项的开关系数,即:

4 实验研究
用于实验的交流电机参数为Pn=2.2 kW,Un=220 V,In=5 A,nn=1 440 r/min,r1=2.91 Ω,r2=3.04 Ω,Is=0.456 94 H,Ir=0.456 94 H,Im=O.444 27 H,Ten=14 N 。
通过实验表明,积分分离PID控制充分发挥了PID控制调节精度高的优点,提高了系统的控制精度。
5 结语
本文提出了一种基于积分分离PID控制的交流伺服系统,在系统误差较大时,取消积分环节;当误差较小时,引入积分环节,从而使系统的静态和动态性能指标较为理想。这种控制方法提高了系统的精度。仿真实验结果表明,该控制器具有很好的动静态性能,是一种行之有效的控制器。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读



















 关注我们
关注我们

