




2、 BERGER LAHR机器人在超声波扫描仪中应用
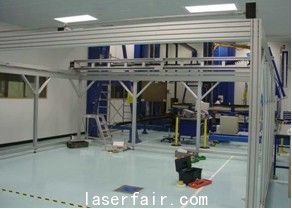
1)任务:航天飞船的仪表板无损扫描
(1) 机器人型号及设备
◆ PR 6/3 , 5400mmx5400mmx400mm
◆ 在Z轴上装配扫描头,对仪表板进行扫描
◆ 使用百格拉高级伺服控制系统TLC612,TLC411实现定位控制
(2) 任务要求:整个过程需要机器人的动作保持
高重复性,低振动,并且在Z轴导轨上,安装可旋转轴,从而增加了扫描的范围,可以完成多方位的扫描任务。
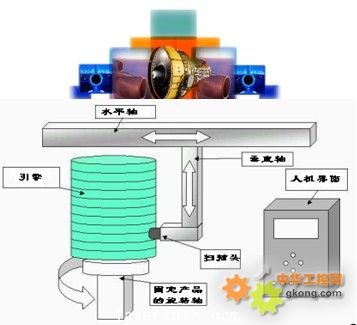
2)任务:航天飞船引擎成分扫描
(1) 机器人型号及设备
◆ 选用二维直角坐标机器人LP-4/2,完成水平和竖直方向上的动作
◆ 旋转轴采用BERGER LAHR步进电机VRDM31117驱动
(2) 任务要求:整个过程需要机器人的动作保持高重复性,并且要求定位极其精确,通过我们编写的程序,可简便地完成自动和手动操作等功能的转换。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

