






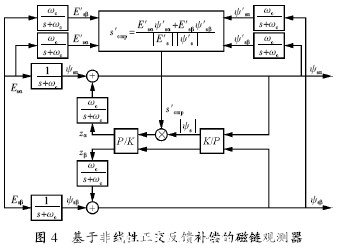
文献[12]对永磁同步电机直接转矩控制中磁链观测这一关键技术进行了研究,设计了一种新型磁链观测器———非线性正交反馈补偿磁链观测器。磁链观测是直接转矩控制技术中关键部分,直接关系到电机的运行性能和直接转矩控制方案效果,适合永磁同步电机直接转矩控制应用的新型非线性正交反馈补偿磁链观测器算法可以用式(1)表示。

通过仿真,采用的基于非线性正交反馈补偿的磁链观测器不仅能在高速下准确观测磁链,而且能有效地解决传统电压积分方法在低速时的不足和弊端,从而验证了基于非线性正交反馈补偿的磁链观测器在理论上的可行性。系统的动态响应快,稳态运行平稳,电流正弦,磁链能够运行在圆形轨迹上。
3.5 基于无传感器控制
通常,高性能的调速系统离不开闭环控制,但速度传感器的安装带来了系统成本增加、体积增大、可靠性降低等问题。因此无速度传感器控制技术成为研究热点,其核心是如何准确获取电机的转速信息。
文献[14]指出,代表性的方案有:瞬时转速估计法,PI 控制器法,模型参考自适应系统法,扩展卡曼滤波法,基于神经网络的方法。
文献[6]提出了在无位置传感器的条件下检测转子初始位置的方法,适用于凸极和隐极同步电动机,受电动机参数影响比较小,在静止、低速、高速范围内均可以估计出转子的实际位置,通过向电动机的定子绕组施加高频检测电压,利用空间凸极效应即可确定转子的初始位置。
文献[15]指出,早先的无传感器控制方法主要集中在高速条件下,有:磁链位置估算法,特点是简单而易于实现,但算法性能取决于电压、电流的测量精度及电机参数准确性;扩展卡曼滤波法,可以直接获得定子磁链矢量和转子位置的估计值,能很好地抑制测量和扰动噪声,但算法对电机参数有较强的依赖性,同时卡尔曼增益也很难确定。
文献[15]针对表贴式永磁同步电动机,在任意同步旋转坐标系上利用电机稳态操作的结果估计反电动势,进而实现了转子位置和转速的估计,采用的反电动势常数补偿算法,系统对反电势参数的变化相当稳健。该方法的位置和速度估计精度高,速度控制范围宽。
文献[13]介绍了针对内嵌式永磁同步电动机的凸极原理,并且基于这个原理介绍了一种根据输入电压检测电流大小的方法,实现简便,且没有依赖电机参数,建立数学模型或要进行复杂计算等缺点。仅需要在原有的电机驱动电路的基础上增加一套针对初始磁极位置检测的程序即可。整个程序分为三个部分:第一部分是测量并比较0毅和180毅电角度的电压矢量,并选择一个大的电压矢量作为起始的角度;第二部分将整个电气360毅周期分为12 个区域,每30毅一格,从0毅或者180毅开始,测量给定电压矢量的电流,在保证测到最大电流时,减少测量的步数,使得测量的时间也尽可能的缩短;第三步则是进一步细分角度,利用二分法来精确的检测磁极位置的角度。这种方法实现起来简便,无须预知电机的参数,无须增加硬件设备,仅须在每次启动电机时导入相应程序即可。
4 永磁同步电机未来研究热点
1)在材料技术方面,随着半导体技术的不断进步,使永磁同步电机体积能够再减小。
2)在电机控制方面,研究如何进一步提高无速度传感器直接转矩控制性能。
3)有无速度传感器控制的速度辨识的研究、矢量控制的鲁棒性研究,直接转矩中电压矢量选择智能化的研究。
4)永磁同步电机控制系统稳定性的问题,研究哪些因素对稳定性有影响。
参考文献:
[1] 冷再兴. 永磁同步电动机弱磁调速控制[D].华中科技大学,2006.
[2] 张昱,张兴. 永磁同步电机直接转矩控制系统的改进[J].合肥工业大学学报,2007.
[3] 徐华中,刘鹏. 一种改进的永磁同步电机直接转矩控制仿真[J].武汉理工大学学报,2008.
[4] 朱洪海. 永磁同步电动机控制系统及其控制方法研究[D].浙江大学,2006.
[5] 许峻峰. 提高永磁同步电动机调速系统性能方法研究[D].西南交通大学,2005.
[6] 郭熠. 永磁同步电动机转子初始位置检测方法[J].微电机,2004.
[7] J S Kim and S K Sul.New Stand-still Position de-tection Strategy for PMSM Drive without Rotational Transducer[J].Conf. record of IEEE,QPEC,1994:363-369.
[8] D W Chung,J Kang,S K Sul.Initial Rotor Position Detection of PMSM at Standstill without Protational Transducer [J]. Electric Machines And Drivers,1999. International Conference IEMD 99.9-12,1999,(5):785-787.
[9] P L Jansen,R D Lorenz.Transducerless Position andVelocity Estimationin Induction Machines and Salientac
Machines [J]. IEEE Transactions on Industry Applications,1993,31(2):240.
[10] Yuhong Z,Kenneth A. Adaptive Flux and Speed Estimation for Induction Motors[C]. Proceedings of American Control Conference, San Diego, California,1999,2521-2525.
[11] 徐生林,郑敏,卢航远,杨成忠.永磁同步电机直接转矩控制的改进与仿真[J].机电工程,2009,26(2):38-41.
[12] 查焱,芮延年,孟淮玉,杜海军.永磁同步电机直接转矩控制的磁链观测研究[J].江苏电器,2008,5:10-11.
[13] 季荣斌,范启富,朱武标.一种新型的永磁同步电机磁极位置检测方法[J]. 兰州工业高等专科学校学报,
2009,16(1):26-28.
[14] 骆再飞,蒋静坪,许振伟.交流伺服系统及其先进控制策略综述[J].机床与液压,2002,6:7-10.
[15] 曾岳南,毛宗源,罗彬,暨棉浩.永磁同步电机无位置速度传感器控制[J].电力电子技术,2006,40(4).
[16] 赵越岭,王燕秋,王英丽.无速度传感器直接转矩控制系统的转速估算方法综述[J]. 辽宁工学院学报,
2003,23(6).
[17] Tajima Hetal. Speed Sensor-less Vector Control method for an Industry Drive System [J]. IEEE. PCC,Yoko-
Hama,1995: 1034-1039.
[18] 贾洪平,贺益康.永磁同步电机直接转矩控制中零矢量的作用研究[J].电气传动,2006,36(4): 13-17.
[19] 郭绪猛,刘景林.永磁同步电机直接转矩控制研究与仿真[J].微电机,2007,40(4): 12-14.
[20] 林辉,刘军.基于矢量控制的永磁同步电机研究[J].电机设计,2009.
[21] 暨绵浩,曾岳南,曾建安,等.永磁同步电动机及其调速系统综述和展望[J].电气时代,2005,5: 20-23.
[22] 林立,黄声华.基于矢量控制的高性能异步电机速度控制器的设计[J].电子技术应用,2006 (2): 102-105.
[23] Bouchikers,Capolinoga. Vector Control of a Permanent-Magnet Synchronous Motor Using AC-AC Matrix
Converter [J].IEEE Transactions on Power Electronics,1998,13 (6):1089-1099.
[24] 王春民,孙淑琴,安海忠,等.基于DSP永磁同步电动机矢量控制系统的设计[J].吉林大学学报:信息科学#p#分页标题#e#
版,2008,26 (4): 343-346.
[25] 林利华,胡育文.磁链观测器的实现[J].电源世界,2004(4).
[26] 郭前岗,李耀华,孟彦京.现代交流传动系统调速技术综述[J].微计算机信息(测控自动化),2004,20(11).
[27] 李正熙,王占扩,杨立永.永磁同步电动机直接转矩控制策略综述[J].变频器世界,2006.
[28] 谢运祥,卢柱强.基于MATLAB/Simulink 的永磁同步电机直接转矩控制仿真建模[J]. 华南理工大学学报
(自然科学版),2004,32(1).
[29] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002(2):8-11.
[30] 谢成祥.永磁同步电机直接转矩控制系统的分析与仿真研究[J]. 华东船舶工业学院学报(自然科学版),
2004(6):39-43.
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

