




1.2刀架控制系统结构和原理
数控刀架是数控车床的关键配套件,为数控车床三大功能部件之一。通过它来实现数控车床刀具的自动切换。任何系列,各种型号的数控刀架均采用端齿盘作为刀架定位元件。通过电机或活塞驱动各种传动机构变换刀具位置,由传感器将刀架工位号反馈给数控系统来完成刀具的正确切换。
刀架控制系统由九大原件组成:控制器、变压器、整流板、驱动器、步进电机、丝杠、刀架电机、刀架台、继电器。其中驱动器我们将有下一章节驱动控制系统着重介绍,继电器将在辅助控制系统中介绍,这一章我们着重介绍步进电机、丝杠整流板在刀架控制系统中的作用。
刀架控制原理图如图1.2.1所示:
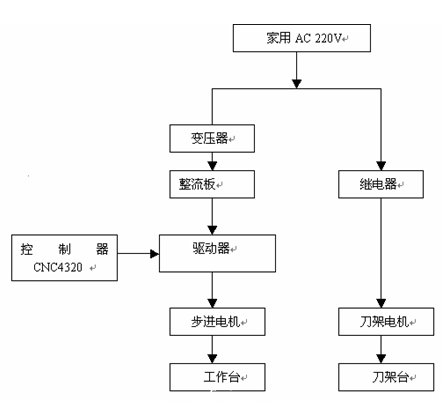
图1.2.1 刀架控制原理图
步进电机又称脉冲电动机或阶跃电动机,国外一般称为Step motor或Stepping motor、Stepper,等等。就传统的步进电动机来说,步进电动机可以简单地定义为,根据输入的脉冲信号,每改变一次励磁状态就前进一定角度(或长度),若不改变励磁状态则保持一定位置而静止的电动机。从广义上讲,步进电动机是一种受电脉冲信号控制的无刷式直流电动机,也可看作是在一定频率范围内转速与控制脉冲频率同步的同步电动机。
这里使用的是二相混合式步进电机,利用位移与输入脉冲信号数相对应,步距误差不长期积累的特点,组成结构简单又具有一定精度的开环控制系统,即刀架控制系统驱动的执行部分。实物图如图1.2.2所示
图1.2.2 步进电机实物图
整流板是用来将交流电进行整流,变成直流电以提供给驱动器使用,其原理为桥式整流电路原理,原理图如图1.2.3所示:
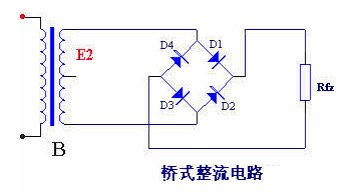
图1.2.3 桥式整流电路原理图
桥式整流电路的工作原理如下:e2 为正半周时,对D1 、D3 和方向电压,Dl,D3 导通;对D2 、D4 加反向电压,D2 、D4 截止。电路中构成e2 、Dl、Rfz 、D3 通电回路,在Rfz ,上形成上正下负的半波整洗电压,e2 为负半周时,对D2 、D4 加正向电压,D2 、D4 导通;对D1 、D3 加反向电压,D1 、D3 截止。电路中构成e2 、D2 Rfz 、D4 通电回路,同样在Rfz 上形成上正下负的另外半波的整流电压。
其工作时的电流流向,实物图如图1.2.4所示:

图1.2.4 桥式整流电路工作时的电流流向,实物图
滚珠丝杠是相对于原来的T形螺纹丝杠而言的。其原理就是转动变平动,丝杠转动。螺纹带动滚珠轴承在杆上滑动。跟丝杠的原理差不多,只是加上滚珠而已。原来丝杠螺纹副转动时摩擦比较剧烈,在内螺纹与外螺纹之间加上滚珠后,就变为滚动摩擦,改善摩擦条件,从而使摩擦阻力减小为原来的1/50。从而也可使其达到高速运转.笔者看到一份资料显示现在最高的丝杠允许速度达到了200m/min.直追直线电机,,是由日本生产,其原理大致是在螺帽和丝杠之间放入滚珠,然后在螺帽上加入返向器,使滚珠在里循环滚动。
其实物图如图所示:

图1.2.5 滚珠丝杠实物图
这里步进电机带动滚珠丝杠旋转,对刀架台X,Z相位置进行精确定位,实现工件的精确加工。控制器中有关刀架控制系统的指令主要有T指令,其指令格式如下:
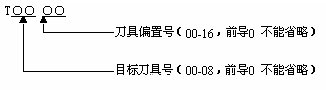
指令功能:自动刀架换刀到目标刀具号刀位,并按指令的刀具偏置号对应的刀具偏置执行刀具长度补偿。 刀具偏置号可以和刀具号相同,也可以不同,即一把刀具可以对应多个偏置号。对应刀具偏 置号为 00 的刀具偏置为 X=0、Z=0,系统为无刀具补偿状态,即:系统的坐标偏移为 0(未 进行坐标偏移)。在执行了刀具长度补偿后,执行 T□□00,系统将按当前的刀具偏置反向 偏移系统坐标,系统由已执行刀具长度补偿状态改变为未补偿状态,显示的刀具偏置号为 00 这个过程称为取消刀具长度补偿,简称:取消刀补。如:T0101表示选择1号刀并执行1号刀偏;T0102表示选择1号刀并执行2号刀偏;T0301表示选择3号刀并执行1号刀偏。
1.3 驱动控制系统结构和原理
相信大家在看了上一章节的刀架控制系统后一定会注意到这样的一个器件:驱动器。这就是我们这一章节重点介绍的驱动控制系统的一个主要元器件。驱动器可以将控制器输入的低电压转化为步进电机需要的高电压输出,它的作用是接收控制器CNC4320的控制指令即脉冲信号驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
驱动器Q2BYG2245AM的实物图如图1.3.1所示。

图1.3.1 驱动器的正视和俯视实物图
驱动控制系统的原理图如图1.3.2所示。
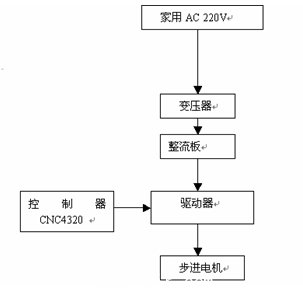
图1.3.2 驱动控制系统的原理图
CNC4320控制器有关驱动器的指令有很多部分如下表1.3-a。
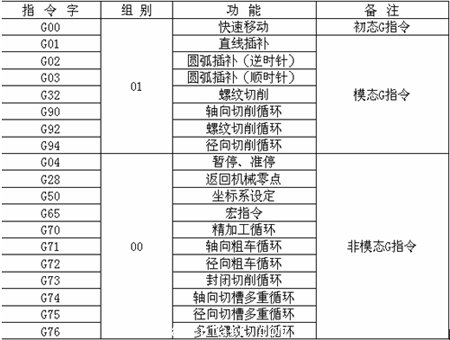
表1.3-a
其实大部分指令都与驱动器有关,因为是它驱动刀架台在X,Z 轴的前后左右的运动。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

