




引 言
现今数控技术的发展方向是开放式体系结构的数控系统,但是未来的开放式数控技术发展的主流是基于计算机标准总线的“PC+运动控制卡”结构。此类数控系统通常选用高速DSP作为运动控制卡CPU,采用主从式控制策略,利用PC和DSP都读取内存的方式来实现上/下位机的通信;优点:信息处理能力强、开放程度高、运动轨迹控制准确、通用性好等特点,被广泛应用于制造业自动化控制各个领域。
1 硬件电路总体设计
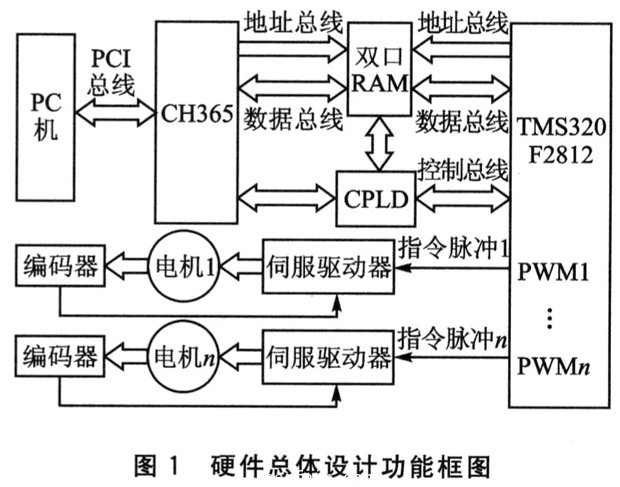
为实现对多电机的半闭环控制提供了一个良好的开发平台。本项目是设计一款基于PCI总线的,以DSP芯片TMS320F2812为核心的多轴运动控制卡。将PC机的信息处理能力和开放式的特点与运动控制器的运动轨迹控制能力有机地结合在一起,利用双口RAM作为公共存储单元实现上/下位机的通信。
系统硬件总体设计功能框图如图1所示。
2 双口RAM接口电路设计
2.1 双口RAM与DSP和CH365的连接
本系统选用双口RAM芯片IDT7025作为DSP与CH365双向通信的缓冲芯片。IDT7025芯片是一款高速的8K×16位双口静态RAM,它提供2个独立的端口,允许两个(左、右)端口同时读/写数据,每个端口具有自己独立的控制信号线、地址线和数据线,可高速存取数据,可与大多数高速处理器配合使用,而无需插入等待状态。
双口RAM允许2个CPU同时读取任何存储单元(包括同时读同一地址单元),但不允许同时写或一读一写同一地址单元。本系统采用基于邮箱机制的INT中断法处理双口RAMD地址竞争冲突现象,避免由此而产生的读/写错误。
下面简要介绍一下IDT7025中断的原理:当用户要用到中断功能时,内存中的1FFE和1FFF单元将作为中断标志邮箱传递命令信息。当左端口定义为写状态(CEL=R/WL=VIL),且在内存1FFF中进行写操作时,右端口的中断标志INTR为低电平,可以向右端口发出中断请求;当右端口对地址1FFF进行访问时(CER=OER=VIL),无论读写都可以清除右端口中断标志INTR。相反也是一样的,当右端口对内存1FFE进行写操作时,左端口可以发出中断请求;当左端口访问地址1FFE时,清除左端口中断标志。使用中断时,向1FFF和1FFE写的内容由用户自行定义,本系统中设定:申请中断时向邮箱写入1或其他大于0的整数,清除中断时向邮箱写入0。
2.2 数据总线扩展电路设计
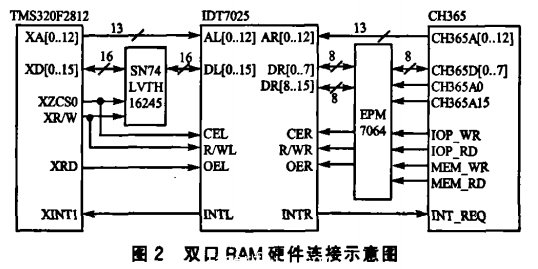
系统采用了双口RAM作为DSP和CH365之间数据传输的缓冲芯片,而TMS320F2812的地址总线为19位,IDT7025为13位,CH365为16位,因此,把IDT7025的13位地址线A[O..12]分别与DSP的地址线XA[O..12]和CH365的地址线A[O..12]相连,并将CH365的地址线A0用作数据总线扩展的使能信号。
CPLD芯片选用A1tera公司生产的EPM7064,通过CH365地址线A0的使能对16位数据进行分时读/写,从而解决了数据总线的扩展问题。其内部逻辑电路如图3所示,其中主要包括2个锁存器(74373b),和2个三态门缓冲器(74541b)。

在本系统中,CH365向双口RAM写入数据时,首先CH365_A0为低电平,锁存器U1使能信号G高电平有效,三态门U2无效(GN2为高电平),低8位写入锁存器;然后偏移地址加1,CH365_A0为高电平,三态门U2使能信号有效,高8位数据直接写入双口RAM,同时低8位数据通过锁存器U1写入双口RAM(OEN为低电平)。CH365读取双口RAM数据时,首先CH365_A0为低电平,低8位数据通过三态门U3直接读入到CH365中,高8位数据锁存到锁存器U4中;然后偏移地址自动加1,CH365_A0为高电平,高8位数据由锁存器U4读入CH365。
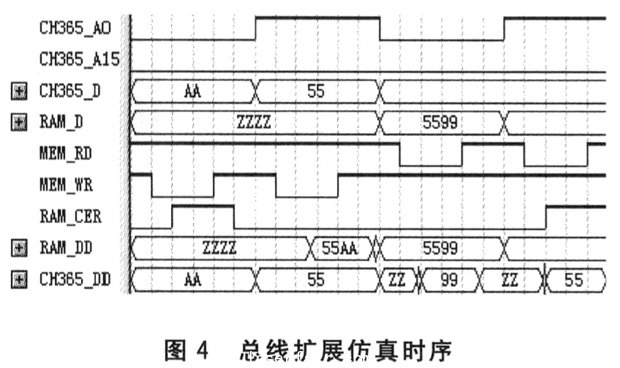
对上述逻辑关系用“MAX+PLUS”进行仿真后,得到图4所示的时序。图中RAM_DD和CH365_DD表示仿真结果,从图中可知仿真结果完全符合设计要求。
3 上/下位机通信软件设计
在硬件电路实现之后,把完成的板卡插于PC机的PCI插槽,上电后根据系统提示安装CH365驱动程序,在正确安装好硬件之后,利用API函数,就可以在VC环境下编写和调试PCI和DSP的通信软件了。
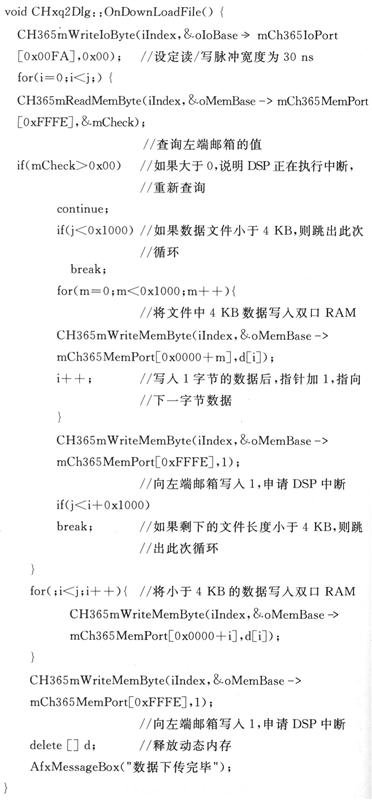
由上述可知,双口RAM的高4 KB空间用于PC机向DSP下载数据,如果数据大于4 KB,则存在着一次不能够把全部数据下载到DSP中的问题。因此,采取了向双口RAM中循环写入数据的办法,即PC机向双口RAM一次只写入4 KB数据,接着向DSP申请中断。DSP响应中断一次性将4 KB数据复制到DSP其他大容量存储空间(如扩展SRAM)中,然后释放双口RAM空间。此时PC机便可再写入4 KB数据,如此循环往复,直到将所有数据都写入DSP中。部分代码如下:
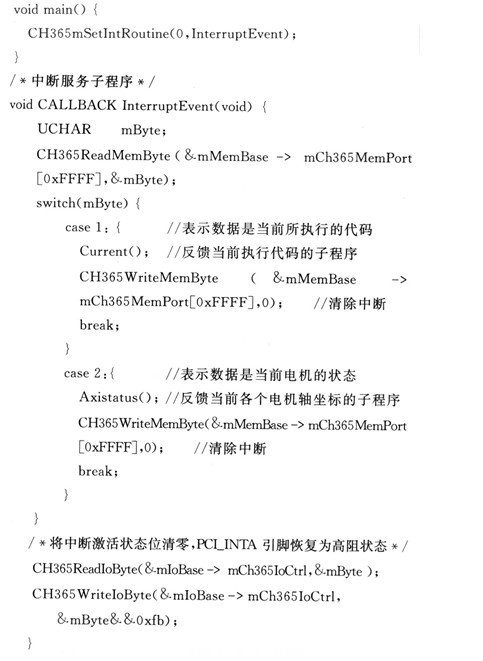
数据反馈功能主要是通过CH365响应DSP中断来实现的。DSP程序将数据写入双口RAM低4 KB空间后向CH365申请中断,CH365响应中断将数据反馈到PC并显示到人机界面。中断函数部分代码如下:
结 语
随着计算机技术和电子技术的发展,将运算高速、功能强大的数字信号处理器应用于运动控制,可以实现复杂的控制算法和实现高精度、高速度、多轴联动,在数控应用中,将会占据越来越重要的地位。而快速准确的通信又是这种运动控制器的基础。本文介绍的通信方式,具有性能可靠,硬件结构简单,价格便宜的优点,具有较好的应用前景。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

