






激光测距是光波测距中的一种测距方式,如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示。
D=ct/2 式中:
D——测站点A、B两点间距离;
c——光在大气中传播的速度;
t——光往返A、B一次所需的时间。
由上式可知,要测量A、B距离实际上是要测量光传播的时间t,根据测量时间方法的不同,激光测距仪通常可分为脉冲式和相位式两种测量形式。
相位式激光测距仪
相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间,如下图所示。
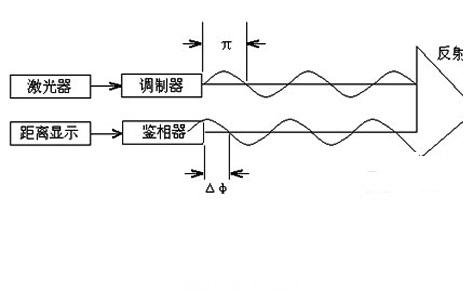
图为相位式激光测距仪测距原理图
相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。
若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为:
t=φ/ω 将此关系代入上式距离D可表示为:
D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ)=c/4f (N+ΔN)=U(N+) 式中:
φ——信号往返测线一次产生的总的相位延迟。
ω——调制信号的角频率,ω=2πf。
U——单位长度,数值等于1/4调制波长
N——测线所包含调制半波长个数。
Δφ——信号往返测线一次产生相位延迟不足π部分。
ΔN——测线所包含调制波不足半波长的小数部分。
ΔN=φ/ω
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

