






1 引言
绝对值位置控制系统对于经常使用的点位控制系统来说,是一种非常方便实用的位置控制方式。一旦原点设置后,完毕每次停电后开机时,这种系统不需要回原点,大大方便了操作。三菱mr-j2s-a系列的伺服系统和三菱fx2n系列plc是在实际中经常用到的伺服系统和控制器,本文讨论在某些特殊的应用场合,如何应用它们来构建一个绝对值位置控制系统。
2 控制任务简介
这是一个实际使用的控制任务,参见图1示意。a点是设备的原始位置,b点是设备的工作位置。开始工作后,设备以位置控制方式移到工作位置b,然后,设备从b以速度控制方式点向a点移动。在移动过程中,执行一些其他的任务,当这些任务完成后在a与b之间的任一位置c点停止。然后以位置控制方式回到原始位置a点,这样整个工作循环结束。
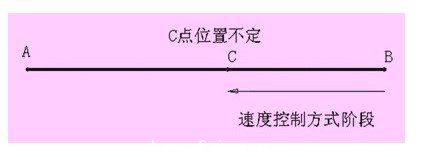
图1 控制任务
2.1 控制平台
三菱j2s-a系列的伺服系统和三菱fx2n系列plc的功能和特性:三菱mr-j2s-a系列的伺服系统中伺服电机的编码器为每转为131072线的绝对值编码器,伺服驱动器能够在停电情况下记住伺服电机的当前位置。该伺服系统有位置控制、速度控制和转矩控制三种运行方式。同时该伺服系统内置绝对位置专用传输协议,如果菱mr-j2s-a系列的伺服系统工作在位置方式,则可配合fx2n系列plc的dabs(读绝对位置)指令,在伺服驱动器通电后伺服on(son信号)有效时,plc中读出伺服电机的当前位置。但仅在son信号接通时的上升沿开始传输当前伺服电机位置一次,在son信号接通以后将不再传输伺服电机的当前绝对位置。伺服电机的当前绝对位置由位置控制装置(如fx2n-1pg模块)根据发出的脉冲数来确定。这实际上是一个开环控制系统。在不发生报警或者脉冲传输不受到干扰的情况下,整个位置控制系统的位置将不会丢失。如果工作在速度控制方式则不能在son接通时读取伺服电机的绝对位置,在整个工作过程中,也无法确定取伺服电机的绝对位置。图2是典型的位置控制系统配置图。
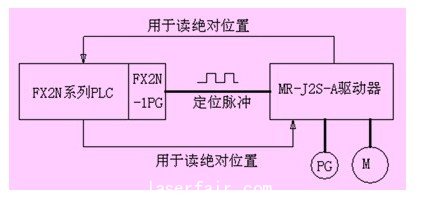
图2 系统配置
2.2 任务分析
在本任务中,伺服驱动器将工作在位置控制和速度控制两种方式。a点和b点的定位操作,要求控制系统必需记住伺服电机的位置,但由于b点与c点之间的速度运行方式,使得传统的控制系统不能获知伺服电机的位置。因为尽管在位置方式位置控制器能确定伺服电机的位置,但在伺服驱动器从位置方式转变为速度方式后,位置控制器将不起作用,所以也无法确定伺服电机的位置。由于在整个控制过程中,既有位置控制方式,又有速度控制方式,所以典型的传统控制配置将不能满足本控制任务,必须采用一种新的控制方式来实现控制。#p#分页标题#e#
3 控制方案的硬件配置
上述问题的基本解决思路是通过plc与伺服驱动器的通讯方式,来实时读取伺服电机的当前实际位置,这样不管伺服系统处于位置控制方式,还是在速度控制方式,控制系统都能知道伺服电机的当前位置,从而使系统能正确地定位在a点和b点。通过查阅资料,我们了解到三菱j2s系列伺服系统除了内置绝对位置专用传输协议外,还内置了三菱伺服通讯协议;三菱fx2n系列内置了无协议通讯指令(rs指令),所以我们可使用rs指令根据伺服驱动器的通讯协议来读取电机当前位置。图3是控制系统框图。
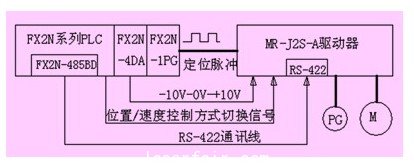
图3 系统框图
在图3中,fx2n系列plc为主控制器,扩展特殊模块fx2n-1pg为定位模块,其输出为频率和脉冲数可控的定位脉冲。当plc主系统通过通讯方式获得伺服电机当前位置的前提下,能在定位指令的驱动下,驱动伺服电机到给定位置;扩展特殊模块fx2n-4da模拟量输出模块,其输出为0到正负10v的电压信号;fx2n-485bd为485通讯卡,它和mr-j2s-a伺服驱动器的rs-422相连;fx2n主机通过485bd-rs422口与伺服驱动器进行通信,读取伺服电机的当前绝对位置。当处于位置控制方式时,电机由fx2n-1pg定位模块发出的定位脉冲来控制,包括其运转速度和目标位置。当位置/速度切换信号有效时,伺服驱动器切换为速度控制方式,由模拟量模块输出的0到正负10v来控制其速度大小和运动方向。安装在plc主机上的485通讯卡与伺服驱动器上rs-422口进行通讯,随时读取伺服电机的当前绝对位置值。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

