




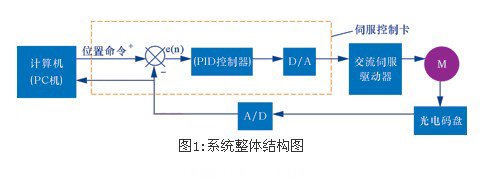
系统组成原理
该系统由四部分组成,即微机、伺服控制卡、交流伺服调速系统、传感检测。主控微机与控制卡相连,可以通过数据线发送位置或速度命令,设定pid调节参数,并进行数模(d/a)转换,该模拟信号经过交流伺服放大器放大后驱动伺服电动机。电机轴端装有增量式光电码盘,通过光电码盘提供反馈信号(a、b、in脉冲)来完成位置伺服系统的位置反馈,组成一个半闭环系统。一般将光电码盘装在电机非负载轴的轴端上,便于安装和避免机械部件振动和变形对位置控制系统产生不利影响。位置反馈环中传感元件—增量式光电编码器将运动构件实时的位移(或转角)变化量以a、b相差分脉冲形式长线传输到现场控制站(pc机)中进行编码器脉冲计数,以获得数字化位置信息,主控微机机算给定位置与实际位置(即反馈到的位置)的偏差后,根据偏差范围采取相应的pid控制策略,将数字控制作用经数模转换变成模拟控制电压,并输出给伺服放大器,最终调节电机运动,完成期望值的定位。
伺服控制方法
工业控制中常用的方法是pid调节器,尽管随着现代交流调速技术的发展,出现了各种新型控制算法,如自适应控制、专家系统、智能控制等。从理论分析,许多控制策略都能实现良好的电机动静态特性,但是由于算法本身的复杂性,而且对系统进行模拟辨识比较麻烦,因此,在实际系统中实现时困难,对于传统的pid调节器而言,其最大的优点在于算法简单,参数易于整定,具有较强的鲁棒性,而且适应性强,可靠性高,这些特点使pid控制器在工业控制领域得到广泛的应用。对于数控系统中的控制对象而言并不复杂,用pid调节器更易实现预期效果。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读





















 关注我们
关注我们

