




位置环pid控制算法
在数字pid调节控制系统中,引入积分环节的目的是为了消除静差,提高精度,但在过程的开始、结束或大幅增加设定值时,会产生积分积累,引起系统较大的超调,甚至震荡,这对于伺服电机的运行来说是不利的。为减小电机在运行过程中积分校正对控制系统动态性能的影响,采用积分分离pid控制正当其时,当电机的实阶位置与期望位置的误差小于一定位置时,再恢复积分校正环节,以便消除系统的稳态误差。
积分分离pid控制算法需设定积分分离阀ε,当|e(k)|》ε时,即偏差值较大时,采用pd控制,以保证伺服电机位置控制精度。
离散化pid控制算式是:
其中,k为采样序号,k=0,1,2…;
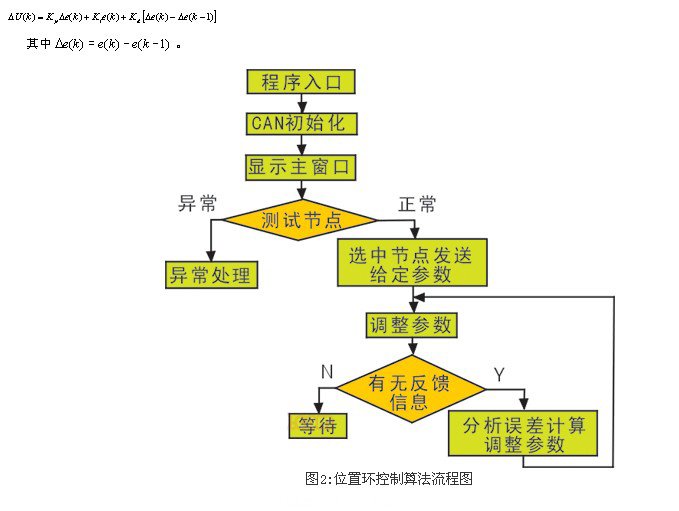
kp、ki、kd分别表示比例,积分、微分系数。在实际中,若执行机构需要的是控制量的增量,根据递堆原理可得增量式pid控制算式为:
控制系统参数的整定
主控微机向控制卡发送pid参数,看给定的参数是否符合控制系统的要求,该过程需用参数整定实现。参数整定得主要任务是确定kp、ki、kd及采样周期t,比例系数kp增大,使伺服驱动系统的动作灵敏,响应加快,而过大会引起振荡,调节时间加长;积分系数ki增大,能消除系统稳态误差,但稳定性下降;微分控制可以改善动态特性,是超调量减少,调整时间缩短。通常的方法有扩充临界比例度法和扩充响应曲线法,以及归一参数整定方法。这几种方法源于使用齐格勒-尼柯尔斯(ziegler-nichols规则),通常可认为交流伺服系统的模型为一阶段有延迟环节的模型(带滞后的一阶环节):
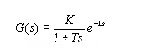
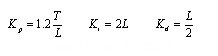
式中的一阶段响应特征参数k、l、和t可以由图3所示的s型响应曲线提取出来。求取这些参数对实际系统并不困难,可以通过对系统进行阶跃输入激励,得到响应曲线,再根据曲线求出其特征参数。于是可由ziegler-nichols整定规则得到:
数字系统中采样周期的选择与系统的稳定性密切相关。一方面要满足香农定理,即ωs≥2ωmax实际系统输入及反馈的最大频率ωmax难以测定,另一方面采样周期并没有一个精确的计算公式,只能根据工程应用按经验规则选取,对于电机控制系统,要求较短时间采样周期,通常为几十毫秒。#p#分页标题#e#
对于交流位置伺服控制系统而言,采用基于pc机的开发平台,用常规的pid调节器进行控制,只要参数整定适当,加之系统的机械精度(运动轴、齿轮、电机丝杠传动化)控制在一定误差范围内,电气控制精度(编码器脉冲)就可得到提高,鲁棒性强,可以在很多场合达到较高精度位置控制的要求。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

