




当今世界上精密加工技术发展很快,新的加工方法和设备层出不穷,计算机的广泛应用使精密加工技术更为普及和多样。 实现精密和超精密切削加工有三种方法: (1) 采用和研制高精度加工设备;(2) 采用新的切削工具材料; (3) 利用加工与测量控制一体化技术。 前两种方法成本较高,而后一种方法成本较低,具有广阔的前景。 在后一种方法中,除了要保证刀具的精度、夹具的精度以及测量精度外,还有一项重要内容就是微进给机构的精度及其控制精度。 笔者在控制精密磨削的研究中,利用步进电机带动滚珠丝杠作为进给机构,在滚珠丝杠确定后,步进电机的控制精度成为了主要矛盾。
1 步进电机的控制
步进电机在不失步的正常运行时,其转角严格地与控制脉冲的个数成正比,转速与控制脉冲的频率成正比。 可以方便地实现正反转控制及调整和定位。 由于步进电机和负载的惯性,它们不能正确地跟踪指令脉冲的启动和停止运动,指令脉冲使步进电机可能发生丢步或失步甚至无法运行。 因此,必须实现步进电机的自动升降速功能。 为了实现速度的变化,输入的位移脉冲指令相应地要升频、稳频、和降频这些脉冲序列,可以由脉冲源加专用逻辑电路来产生,也可以由微型计算机产生。 对于脉冲源加逻辑电路构成的控制器来说,控制逻辑是固定的,即控制电路一经固定,其控制逻辑也就固定了。
如果要改变控制逻辑和控制方案,必须改变电路结构和元件参数,而使用计算机控制,不必改动硬件电路,只要修改程序,就可以改变控制方案。 且可以从多种控制方案中,选取一种最佳方案进行控制和调节。 也可以用同一套系统对不同控制方案的多台步进电机同时控制。 利用计算机控制的形式也很多,本文介绍PLC位控单元对步进电机的控制。
2 PLC 系统组成及位控单元的工作原理
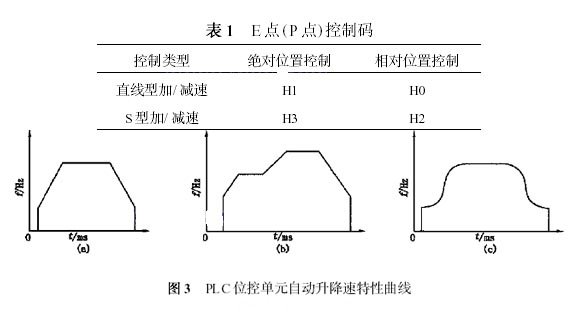
本研究所利用的PLC 系统的组成包括如下七大模块:电源,CPU ,位控单元, I/ O 单元,A/ D ,D/ A 单元。 其中位控单元的主功能是当步进电机(或伺服电机) 与电机驱动器联结时,输出脉冲序列控制电机的转速与转角。 进给机构可以是2 轴型,也可以是4 轴型。 本文采用的是前者,即滚珠丝杠的横向进给与纵向进给,如图2所示。 具体地说,位控单元实现速度以及位置的控制方法有多种,如E 点控制(单速度控制) ,如图3(a) 所示;P 点控制(多级速度控制) ,如图3 (b) 所示; 线性加/ 减速和S型加/ 减速,图3 ( a ) , ( b)为线性加/ 减速,S型如图3 (c) 所示。 除此之外还有绝对位置控制和相对位置控制等。 表1 给出了E点控制不同模式的控制码(P 点与其相同) 。


3 磨削加工PLC 控制原理
如图4 所示, PLC 可以控制变频器、传感器、步进电机。 总控制程序流程图如图5 所示。 其中两个步进电机是利用PLC 的位控单元控制的。 在进行精密磨削过程中,横向进给将是十分重要的,PLC 的位控单元能较精确地控制步进电机的转角,从而使滚珠丝杠获得精确定位。 由于PLC 位控单元的控制方法有多种,对于磨削加工来讲,横向进给量不能大于215μm ,通过实验的方法可以找出最佳方案。 这里只通过一种控制方法来说明位控单元的具体应用。 首先,设置原点,利用光栅尺粗对刀,测量出对刀位置距原点的距离。 为防滚珠丝杠出现爬行现象,工作台从原点出发,经过一段距离以后开始自动加/ 减速。 此时,只要给定起始速度,目标速度,加速/ 减速时间以及位置要求值,并设定控制码即可实现上述功能,相关程序如图6 所示。 如果假设滚珠丝杠的螺距为d ,步进电机的步距角为α°;进给速度为v (mm/ s) ;行程为s (mm) ;则要求的脉冲频率(即程度中的目标速度) 为f = 360 v/αd (Hz) ;总脉冲数(即程序中的位置要求值) 为F =360s/da(个) 。


4 结束语
PLC 位控单元具有运行速度快、灵敏度高、精度高、编程简单等众多优点。 因此,它对于在精密加工领域的研究开发与应用具有深远的现实意义。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读



















 关注我们
关注我们

