




0 引言
在导弹车载行军过程中,车上的导弹会受到各种振动的冲击影响,这种振动冲击如果过大则会造成导弹的损伤或损坏。在此介绍了一种基于ADXL50单片集成加速度传感器的加速度测量方法,用于检测导弹在车载行军过程中受到的振动冲击。单片集成加速度传感器ADXL50体积小、方向性好、精度高、时漂与温漂小;在+5V单电源下工作,使用方便,所需外围元器件少;可靠性很高,在通电时可以承受500g的加速度冲击,不加电时可以承受2000g的加速度冲击而不致损坏。因此可以应用于导弹运输车。
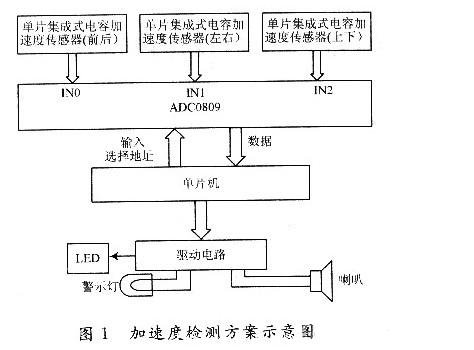
1 设计方案
设计方案如图1所示:包括传感器及外围电路、信号处理装置、显示报警电路等3部分。传感器及外围电路封装于小型屏蔽容器内,固定于导弹载行车上,ADXL50加速度传感器采集振动加速度信号,并输出相应的电压信号;信号处理部分接收到传感器采集来的模拟电压信号,对其进行模/数转换,将加速度的值显示于LED上,然后进行数据判断与处理,当超过安全范围时给出报警,提醒司机注意驾驶。
2 传感器及外围电路的设计
方案拟采用美国AD公司生产的ADXL50加速度计作为加速度传感器。该器件集成在单片集成电路上,采用差动电容作为敏感元件,直接输出电压信号,便于信号的采集与处理。
2.1 ADXL50的主要技术指标
测量灵敏度为19mV/g;满刻度测量范围为±50g;频率响应范围为DC~1 kHz;在开关信号控制下可进行自检;内置缓冲放大器,可用于输出灵敏度及零加速度输出电平调节。
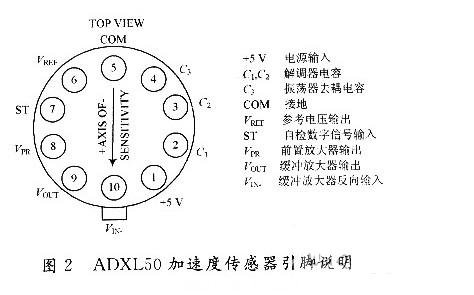
2.2 ADXL50工作原理和基本测量电路
ADXL50是一个完整的加速度测量系统,它将一个传感器部件和完成加速度测量有关的电路,包括振荡器、解调器、前置放大器、缓冲放大器、参考电源及温度补偿电路等。全部集成在一片硅晶片上。芯片封装于10脚T0100管壳内,这10脚的定义如图2所示。
图3为加速度传感器的原理框图。其中使用了3个外接电容和3个外接电阻。C1用以决定测量系统的带宽,C1和C2的容量一般选用O~0.2 2μF,C2一般为0.1μF即可。ADXL50在出厂前,厂家已将其前置放大器的测量灵敏度调整为19 mV/g,其Og时的输出电压VPR为1.8 V。因此,若加速度为±50g,则VPR=1.8V±O.95V,若加速度为±20g,则VPR=1.8 V±O.38V。由于在VPR上的信号不标准,不适于读取进行
显示或进行数字化处理。另外,ADXL50前置放大器的注入电流最大只能有25μA,驱动能力很小,因此,VPR上的信号要做进一步处理,才能满足要求。一般外接几个电阻与缓冲放大器构成一个放大环节,以调整传感器的VPR的Og电位,并提高输出信号的灵敏度。
经缓冲放大后的加速度信号,其变化范围最好处于0.5~4.5V之间,使之距电源的高低两端都有一定的余量。若加速度正、负两方向的变化幅度相近,就可将Og电位调在2.5V左右。这样,正、负加速度信号在传感器输出口Vout上就有±2V的变化范围。设待测加速度的范围为±50g,则VPR=1.8 V±O,95 V,欲使Vout=2.5V±2.OV,就需将信号中的交流分量放大。缓冲放大器的放大系数为-R3/R1,所以,若取R1=50kΩ,即可确定R3=105 kΩ。
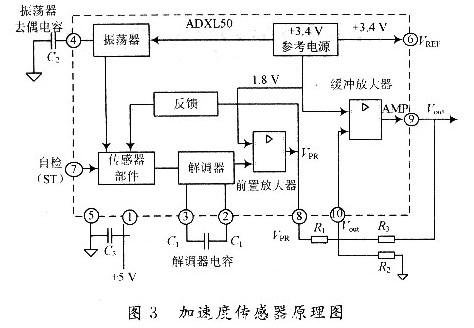
在图3中,R2的一端接地,为使0g时Vout=2.5V,R2应满足条件:R2=(1.8×R3)/(Vout-1.8)=270 kΩ。
2.3 ADXL50在使用时应注意的事项
(1)ADXL50有一个灵敏轴,其方向是从第5脚指向第10脚(即指向管壳定位片),如图2所示。传感器测量的就是沿此轴的加速度。设此轴为x轴,又设在传感器管壳底部平面内与x轴垂直的方向为y轴。若加速度g的方向与传感器底部xy平面之间的夹角为α,则加速度g在xy平面上的分量为gxy=gcosα。又设加速度分量gxy与传感器灵敏轴之间的夹脚为β,则gxy在灵敏轴上的分量为gx=gxycosβ=gcosαcosβ。因此,在安装加速度传感器时,要尽量使其灵敏轴与加速度的方向一致,否则就得对测量结果做必要的修改,以免造成过大的误差。
(2)ADXL50要安装在电路板上使用。在电路板的共振频率与待测加速度的频率相近时,若电路板稍有松动,就会产生共振,使测量结果偏大,造成误差。因此,在安装电路板时,要选择合适的位置,固定牢靠。在对系统进行试验时,最好在不同的频率下测试,以便发现可能的共振问题。
(3)解调器滤波电容C1的作用:决定ADXL50的带宽;对解调器信号进行滤波。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

