





如今3D打印机所面临的一个问题是,它们的打印尺寸实际上是受到3D打印机的大小限制的。如果要打印一栋房子,你就需要一台比房子大的3D打印机(除非分开打印)。这就严重限制3D打印机尝试打印更大物体的能力,为了解决这一问题,总部位于巴塞罗那的加泰罗尼亚先进建筑研究所(IAAC)的一队研究人员,在Sasa Jokic和Petr Novikov的带领下,开发出了一种可自主移动的3D打印机器人Minibuilders,这种机器人可以像建筑工人那样来回移动,构建大型物体,如建筑物等。
“在建筑行业,我们已经有整整一个世纪没有看到任何颠覆性的技术出现了。”IAAC研究团队说,“我们相信,机器人和增材制造将在未来的建筑行业发挥关键作用。”
Minibuilder包括三种不同的机器人装置,每种机器人尺寸不大于42厘米。尽管其体积小,但它们能够打印几乎任何建筑物。据了解,这三种机器人,各自拥有不同的功能,可以在大型3D打印项目中进行分工协作。
地基(Foundation)机器人
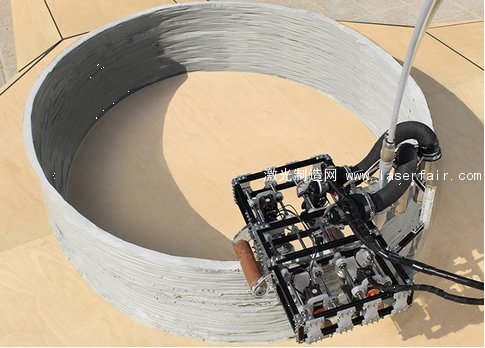
这是进入施工现场的第一个机器人。它使用轨道以及带线的传感器四处走动,识别项目的大致轮廓。这种机器人举着打印头逐层堆积打印对象,打印头也随之升高,当打印对象的高度升到地基(Foundation)机器人接触不到的地方时,就轮到下一个机器人出场了。
抓握(Grip)机器人
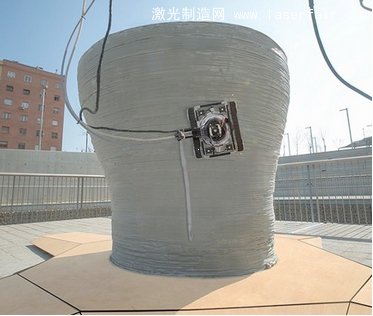
这种机器人使用四个滚轮将自己夹在构建对象的顶部。每个滚轮都与旋转和转向致动器相连接,这样机器人可以很精确地将自己定位在打印对象指定的区域上,并开始3D打印。由于这个机器人需要在之前打印结构的上面作为固定自己的支撑,所以3D打印材料的干燥固化速度需要非常快,这样才能支持下一层的打印。为了加速材料的干燥固化,抓握(Grip)机器人还配置了加热器。一旦打印对象的结构和形状3D打印完成,最后一个机器人就出现了。

真空(Vacuum)机器人
这是MiniBuilder施工过程中的最终机器人。它使用一个真空的吸盘,以使自己附着到3D打印对象的表面上。这种机器人的目的是为了加强其已打印的结构。要做到这一点,它通过两条轨道在结构上反复上下移动,以几乎垂直于其他层的方式打印材料,为一些更大的物体提供结构支撑。
理论上说,一起工作的这些Minibuilders机器人能够3D打印无限大的对象,而不再受3D打印机自身尺寸的限制。虽然目前这项技术可能尚未完善,但显然研究人员已经迈出了第一步。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

