



据日经BP社报道,“2014年底特律第21届ITS世界大会”于2014年9月7日在美国密歇根州开幕。开幕之前,丰田公布了用于辅助安全驾驶的自动驾驶系统及其关键技术的开发进展情况。自动驾驶系统将于2015年以后在美国实现商品化。
丰田在日本国内实施AHDA试验时的画面(图片截自该公司公开的视频)
此次公开的自动驾驶系统为丰田版高级驾驶辅助系统(ADAS)——自动高速公路驾驶辅助系统(AHDA)的新版。新版AHDA根据美国公路的实际环境进行了改进,可达到时速70英里(约110km/h)。主要采用了三项技术辅助驾驶员驾驶,在高速公路上安全地保持车道和车间距离。与2013年展出的版本不同,此次未配备车车间通信技术。
此次采用的三项关键技术分别为:动态雷达巡航控制(DRCC)、车道跟踪控制(LTC)和人机界面(HMI)。
动态雷达巡航控制:DRCC利用配备在前格栅的77GHz毫米波雷达检测前车,保持一定车速并与前车保持距离。
车道跟踪控制: LTC利用前置摄像头和77GHz毫米波雷达的数据来检测道路标志线和前方车辆,计算出最佳的行驶路线,并自动控制方向盘和加减速,辅助驾驶员在车道内行驶,且更加轻松安全地保持行驶路线。
人机界面:HMI秉承丰田提倡的在ADAS中驾驶员也始终是驾驶主角的理念,采用了专用HMI,可顺畅切换手动驾驶和自动驾驶。
这次大会上丰田还展示了正在开发的两项关键技术。
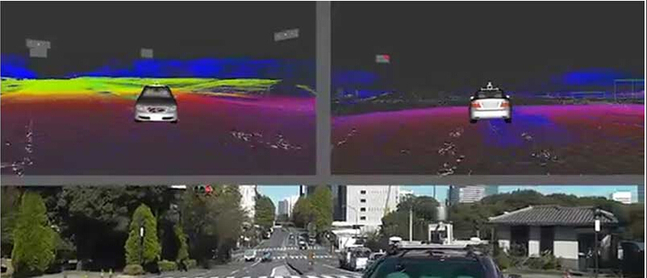
一项是车载用成像激光雷达SPAD LIDAR(Single Photon Avalanche Diode Light Detection And Ranging)。通过向周围照射近红外激光,根据反射光,实时三维识别行人、汽车、公路及地形等。实现了毫米波雷达和立体摄像头两项功能。配备了可以高精度检测障碍物位置和形状、且不分昼夜地配合外部光线调节感光度的主动传感器。这项技术是丰田与丰田中央研究所共同开发的,尺寸比在2013年1月于美国内华达州举行的“2013年国际消费类电子产品展览会”上公开的自动驾驶技术实验车所配备的LIDAR要小。
SPAD LIDAR在受光部分采用了利用雪崩现象的光电二极管。利用该现象,即使接收到微弱的光线,只要超过阈值,就能产生比光子碰撞所产生的电流更大的电流,从而获得高感光度(参阅本站报道)。
另一项技术是3D平视显示器(3D-HUD)。这是以美国丰田信息技术中心为中心,为提高人与车辆的联动性而开发的界面。可将车辆状态、标志及交通状况等信息重叠在前窗玻璃外的公路上实现3D显示。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读



















 关注我们
关注我们

