






什么是激光雷达?为什么说它是自动驾驶汽车的“眼睛”?它有哪些主要应用?又面临哪些机会和挑战?Comet Labs合伙人Adam Kell用通俗的语言和大量实例解答了上述问题。
二、什么是激光雷达
三、激光雷达系统的应用


激光雷达系统已经找到了他们被应用于人形机器人的方式——比如波士顿动力的这个机器人:
除了机器人头部的激光雷达系统之外,这个机器人还使用其他传感器,比如用光学相机来扫描类二维码。

四、激光雷达面临的机遇与挑战

一、一个形象的比喻
想象一下,你站在一个黑暗的房间里,你能感觉到周围环境的唯一方式是伸出棍子触碰物体。 首先,你径直向前伸出棍子,棍子在伸出12英尺后撞击到一个坚实的物体。 然后你向右伸出棍子,伸出8英尺后停止。接下来试试你的左边,有12英尺。最后,在你的后方,棍子伸出了18英尺。于是,即使你看不到任何东西,也不移动身体,你也能获得一些关于房间的信息。
如果你在不同的方向重复几百或几千次这样子动作(并且记忆力极强),你将能够根据物体和你的距离大致了解这个屋子的全貌。
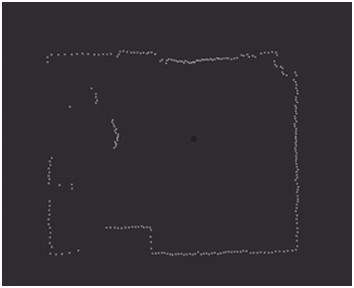
图1 针对一间屋子的墙的二维扫描
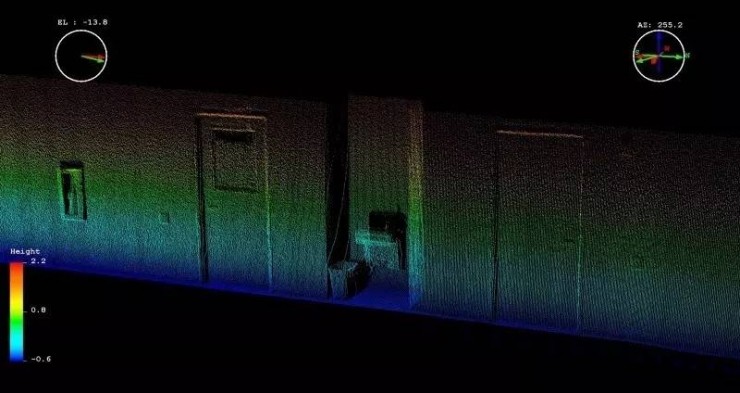
如果向上或向下倾斜棍子,你甚至能够根据轮廓“看到”周围的物体,如椅子和门。这些信息可以产生一个叫做“点云”的图像,它是三维坐标系中的一系列点。当你拥有足够多的点,就可以生成一个非常完整的基于点云的房间,像这样:
图2 针对墙和饮水机的三位扫描
二、什么是激光雷达
激光雷达(LIDAR,“光”和“雷达”的组合词)是一种被设计用于快速构建这些点云的传感器。通过使用光来测量距离,激光雷达能够非常快速地采集样点——每秒高达150万个数据点。这个采样率使得该技术能够部署在自动驾驶车辆等应用上。
工作原理
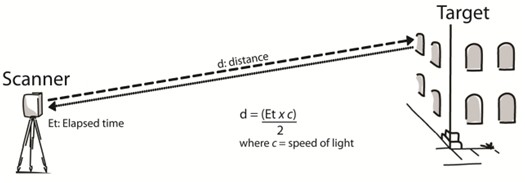
激光雷达测量光脉冲的飞行时间,进而能够判断传感器和物体之间的距离。想象一下,当发出光脉冲时启动秒表,然后当光脉冲(从遇到的第一个物体反射出来)返回时停止计时器。通过测量激光的“飞行时间”,并且知道脉冲行进的速度,就可以计算距离。光以每秒30万千米的速度传播,因此需要非常高精度的设备来产生关于距离的数据。
图3 用激光当“棍子”来测量距离
为了产生完整的点云,传感器必须能够非常快速地对整个环境进行采样。激光雷达能够做到这一点的一种方式是通过在单个发射器/接收器上使用非常高的采样率。 每个发射器每秒发射数万或数十万个激光脉冲。这意味着,多达100000个激光脉冲在1秒内完成从激光器单元上的发射器到被测量的物体的往返行程,并返回到激光雷达单元上位于发射器附近的接收器。较大的系统具有多达64个这样的发射器/接收器(它被称为“线”)。多线使系统能够每秒产生超过一百万个数据点。
然而,64个固定线不足以映射整个环境——它只是在非常集中的区域给出非常清晰的分辨率。 由于光学中所需的精度,制造更多的线是非常昂贵的,因此在线数超过64后继续增加线数会使成本急剧增加。因此,许多激光雷达系统使用旋转组件或旋转镜来使线围绕环境进行360度扫描。常见的策略包括使单个发射器和接收器向上或下偏转使激光器视野覆盖范围更大。 例如,Velodyne的64线激光雷达系统具有26.8度的垂直视角(通过旋转使其拥有360的度水平视角)。这个激光雷达可以从50米开外看到一个12米高的物体的顶部。
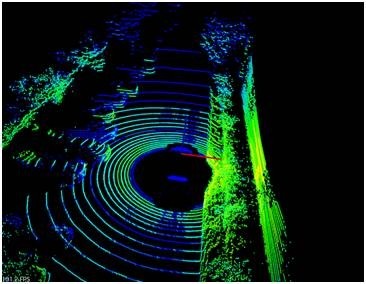
下图中可以看到,距离激光雷达的远近不同,点云的疏密程度也不相同,这是由于数据保真度随着距离而下降。虽然它不是完美的,但是较高分辨率可用于较近的物体,因为随着到传感器的距离增加,发射器之间的角度(例如,2度)会导致这些点带之间的间隔更大。
图4 旋转的多线激光雷达产生的点云
三、激光雷达系统的应用
点云可用于再现景观或环境的三维模型,一些应用包括:
用于监测侵蚀或其他变化的地质测绘/成像
监测农作物和树木的生长情况
为建筑项目做测量工作
对垃圾填埋场进行准确的体积预测
最常见的应用大概是一个激光雷达系统集成在一辆自动驾驶汽车上——例如Top Gear的一辆卡车使用激光雷达系统进行越野自主导航。
图5 全速行驶的自动驾驶卡车
下面的片段中,你可以看到景物的点云,以及附加的功能(绿色的小方块代表可以驶过的物体,如植物;红色的小方块代表不应驶过的物体——如岩石,树木和汽车)。其他一些软件模块也能对原始点云进行理解,并将障碍物分类。
图6 全速行驶的自动驾驶卡车
激光雷达系统已经找到了他们被应用于人形机器人的方式——比如波士顿动力的这个机器人:
图7 波士顿动力的Atlas
除了机器人头部的激光雷达系统之外,这个机器人还使用其他传感器,比如用光学相机来扫描类二维码。
激光雷达应用的另一个例子是水平安装在无人机上的用于绘制地面等高图的传感器。来自激光雷达的点云数据与无人机自身的位置数据结合产生出了这些等高线。
图8 搭载Phoenix Aerial系统的无人机对地面进行测绘
四、激光雷达面临的机遇与挑战
4.1 机遇
激光雷达在智能机器生态系统中有很多机遇。与使用二维图像相比,点云能够更容易的被计算机使用,用于构建物理环境的三维形象——二维图像是人脑最容易理解的数据,而对于计算机来说,点云是最容易理解的。
Scanse的一款价值250美元的名为“sweep”的二维激光雷达扫描器可在户外使用,并专为移动、低功耗应用而设计。它只用了竞争对手近四分之一的成本,这将给这类传感器带来全新的应用(我们在很多其他类型的传感器中已经看到过这样的现象)。 二维激光雷达也可以被搭载到另一个旋转的元件上以产生环境中完整的三维点云。
图9 Scanse的Sweep扫描的三维环境
其他公司正在寻求降低系统成本的其他策略,例如Quanergy的固态激光雷达。该系统大体与上文已介绍的系统相同,然而,与使用旋转光学器件来移动光束不同的是,它们使用 “相控阵列光学系统”来引导激光脉冲的方向,它可以在某一方向上释放一个激光脉冲,而让下一个脉冲(1微秒之后)瞄准视野中的其它地方。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

