




随着现在机器人技术的创新与普及,开发能够模仿有机物行为的软性机器人成为一种新的研发方向。在灾难管理、海洋保护或医疗保健等应用中,这些先进的设备与人类一起工作,具有更大的潜力。日本山形大学的研究人员已经开发出了全3D打印的执行器,该执行器可以构成类似水母的软机器人。

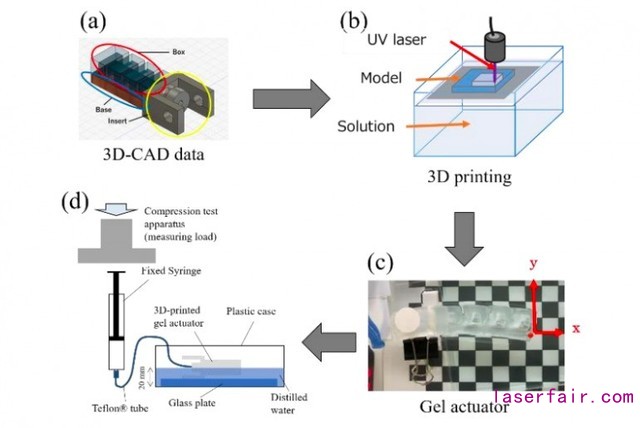
使用基于紫外线的3D打印机,该团队能够将新合成的粒子双网络(P-DN)水凝胶固化成一种与月水母的肌肉相似的收缩机制。基于他们新颖的设备,科学家们现在打算创建一个具有潜在海洋野生生物监视应用程序的完整的水生机器人。
在团队开始3D打印其执行器之前,他们合成了一种新型的交联P-DN水凝胶,该凝胶由硬而脆的第一聚合物和较软的第二层组成。该材料的特点是高含水率,增强的强度和出色的可印刷性,为它们的装置形成了坚实而易延展的基础。
准备好配方后,科学家们使用基于UV的3D打印机将其聚合成三个独立的部分:连接器,底座和盒子。从理论上讲,“底座”和“盒”设计为通过注入空气而变形,从而产生提供推进所需的收缩,而“连接器”仅将硅树脂管固定在执行器的主体上。
为了进行测试,团队3D打印了五个不同的原型,发现凝胶的弹性与所用单体的类型紧密相关,并且达到了交联的水平。同样,执行器的生产宽度为0.4-0.5 mm,因为较厚的层会出现膨胀,从而导致零件不一致。
在压缩测试中,通过管道将空气注入执行机构,科学家发现他们能够通过调节其组成部件的弹性模量来控制其变形。该设备还显示出与扁圆月水母相同的收缩率,可能使其成为完整机器人复制品的理想基础。
紫外线3D打印机制造的五个凝胶致动器原型
研究人员认为,完善执行器壁厚与其轨迹之间的关系,将是开发改进的设备迭代的关键。目前,该团队打算将其执行器集成到一个新颖的海ly启发式机器人中,最终目的是在海洋保护应用中使用它。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

