





与普通机器人不同,微型机器人因其体积的优势,广泛应用在微型物体操纵和靶向给药方面,一直是探索癌症治疗的一种针对性治疗技术。
在生物应用中,为了实现更复杂的微 / 纳米药物操作(例如封装和释放),解决更多的微型操作技术难题,微型机器人需提高其适应动态环境的形状变形能力。
01
遇酸释放,靶向治疗
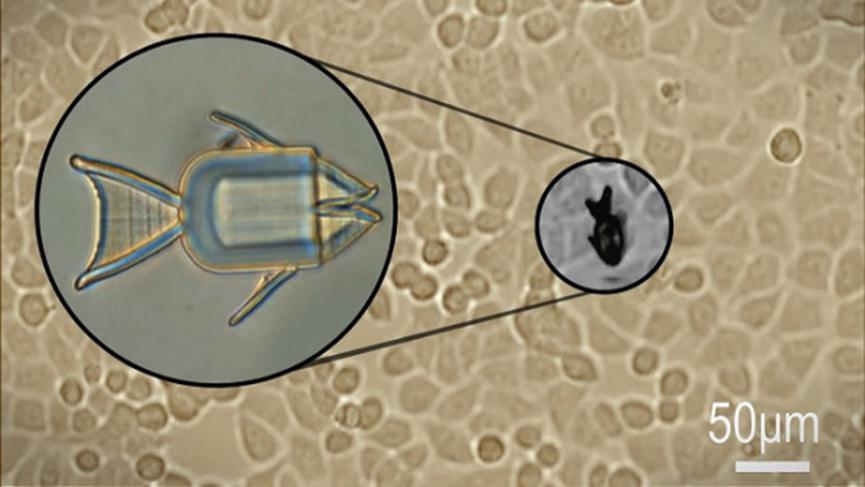
日前,中国科学技术大学研究人员李佳文、张丽、吴东及其同事开发出微型 3D 打印的机器人动物,可用于直接向癌细胞输送化疗药物,这将有助于减弱药物副作用,提高治疗能力。研究人员所追求的应用包括使用体外磁铁将微型机器人引导到实体肿瘤,然后肿瘤的天然酸性微环境刺激形状变化,导致化疗药物的局部释放。
在此之前,研究人员已经开发出可以操控微型物体的机器人(小于 100 m),但大多数机器人只能操控其行踪,无法根据复杂的任务改变它们的形状(例如释放药物)。一些研究团队制造出了 4D 打印物体(利用 3D 打印设备,可根据某些刺激改变形状,这种能力增加了一个额外的 " 维度 ",并促使中国团队将该过程描述为 4D 打印)。但它们通常只能执行简单的动作,并且无法实现远程控制。
为解决上述问题,研究人员希望能够开发出变形的微型机器人,可以通过磁铁引导其到人体特定部位进行治疗。由于肿瘤存在于酸性微环境中,研究小组决定让微型机器人改变形状以适应低 PH 值的酸性环境中。这一成果,向微型机器人在生物医学应用迈出重要的一步,该研究成果以论文形式发表在 ACS Nano 上。
02
形状多变,外观太 Q 萌
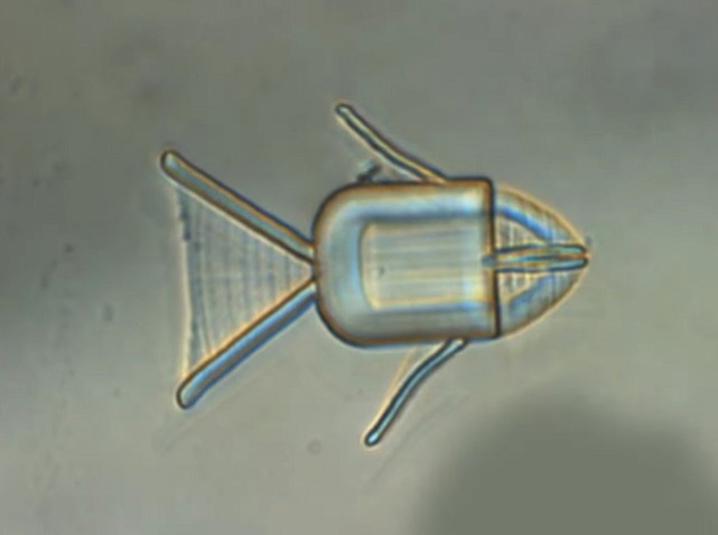
研究中微型机器人由水凝胶(对 PH 值敏感)经 3D 打印成不同的动物形状,例如鱼、螃蟹和蝴蝶等,水凝胶表面多孔隙,用于携带颗粒。同时,研究人员在特定区域(例如蟹爪或鱼嘴)改变了机器人的打印密度。故而,这些区域可以按照环境酸度的改变而开或关。
另一个挑战涉及微型机器人的移动,例如目标将其引导至实体肿瘤部位。为了解决此难题,研究人员将思路转向了磁铁。他们通过将微型机器人浸泡在氧化铁纳米颗粒的悬浮液中来磁化微型机器人,以便磁铁来移动微型设备。这意味着当微型机器人在体内时,可以通过在人体外部施加磁铁或磁场来远程和微创控制其行动。
在实验室测试中,该团队在一个同样含有癌细胞的培养皿中的人造模拟血管中测试了微型机器人。他们成功地利用磁铁操纵微型机器人穿过血管并趋向血管一端的癌细胞,他们降低了 PH 值以模拟肿瘤的天然弱酸性微环境。在微酸性的溶液环境中,如预期所示,鱼嘴释放出了药物,并成功使癌细胞凋亡。在另一测试中,螃蟹形的微型机器人可以用蟹钳夹住药物纳米颗粒,移动到目标位置并靶向释放药物。
这项技术对于靶向递送药物提供了希望。未来,该团队表示需要将微型机器人体积做得更小,使得它们能够穿过真正的血管,同时还需要探索一种利用身体对其跟踪的方法。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

